



















8 PARAMETER FUNCTIONS
8-46
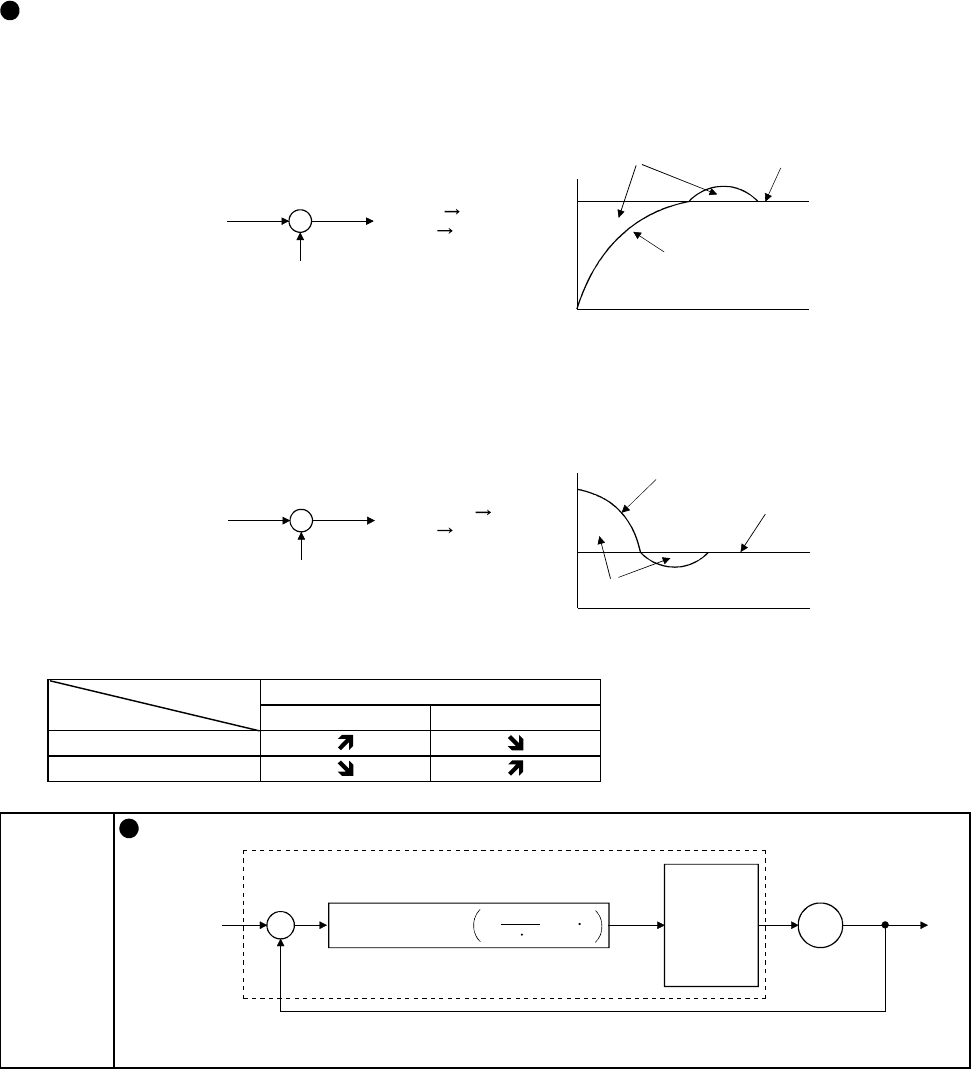
(1) PID operation setting
Using Pr. 128, select the PID action and speed command input method.
Reverse action and forward action
1) Reverse action
Increases the manipulated variable if deviation X (set point - process value) is positive, and
decreases the manipulated variable if deviation is negative.
Process value
Set point
[Heating]
Process value
Deviation
Set poin
t
X>0
X<0
Cold fi up
Hot fi down
+
-
2) Forward action
Increases the manipulated variable if deviation X (set point - process value) is negative, and
decreases the manipulated variable if deviation is positive.
Set point
Set point
[Cooling]
Process value
Process value
Deviation
Too cold fi down
Hot fi up
+
X>0
X<0
-
Relationships between deviation and manipulated variable
Deviation
Positive Negative
Reverse action
Forward action
MEMO
Basic PID control configuration
x
y
fi
M
y
Motor
Drive Unit
Process value
Set point
Kp: Proportional constant Ti: Integral time S: Operator Td: Differential time
Deviation
PID operation Kp 1+ +Td S
Drive
circuit
Manipulated
variable
Ti S
1
+
-