



















8 PARAMETER FUNCTIONS
8-22
Initial value
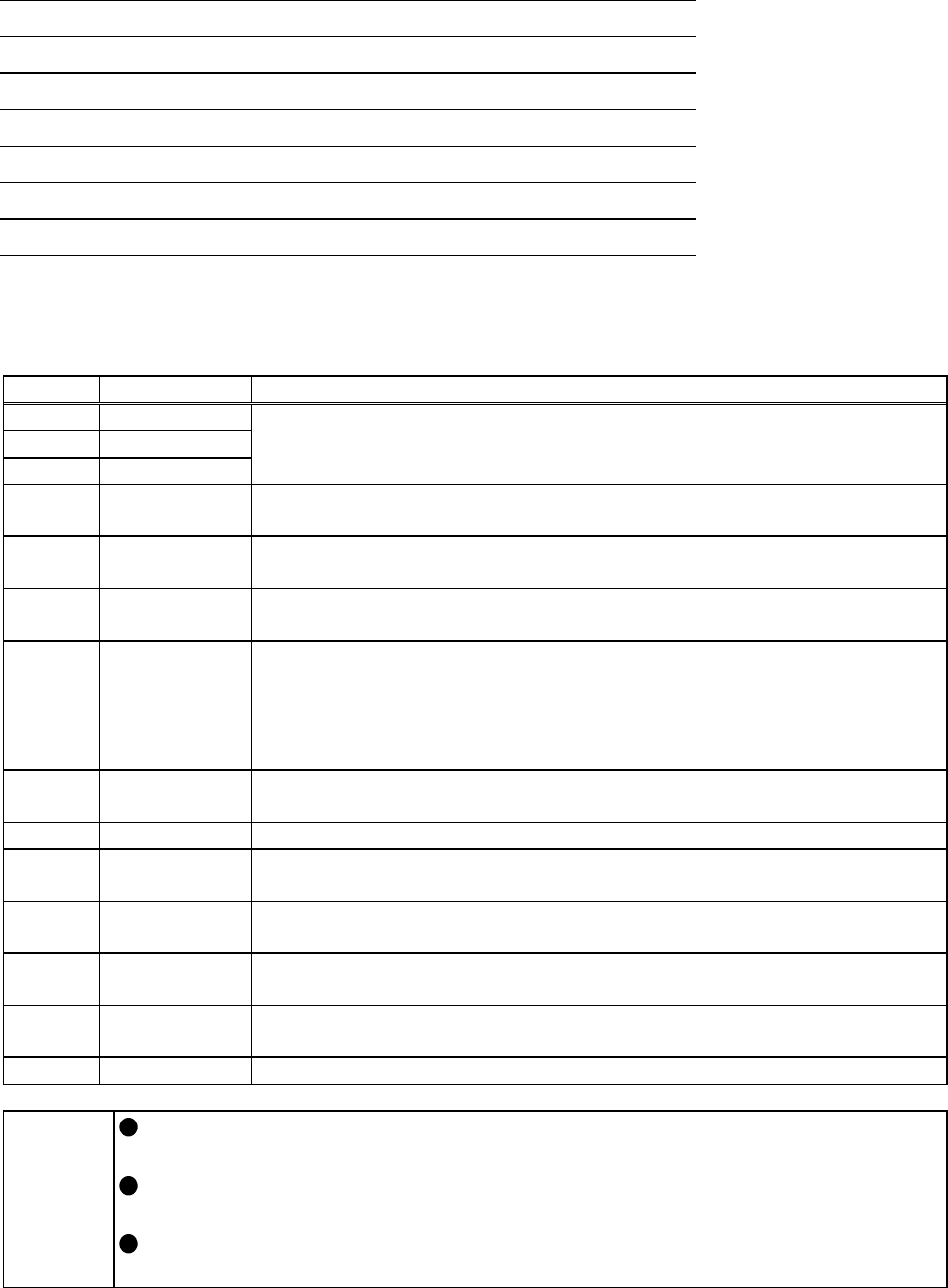
Pr. 180 "RL terminal function selection" 0
Pr. 181 "RM terminal function selection" 1
Pr. 182 "RH terminal function selection" 2
Pr. 183 "RT terminal function selection" 3
Pr. 184 "AU terminal function selection" 4
Pr. 185 "JOG terminal function selection" 5
Pr. 186 "CS terminal function selection" 8
Pr. 187 "MRS terminal function selection" 24
By setting the corresponding parameter values, you can select/change the functions of the control
circuit contact input terminals.
The following table lists the values and functions that may be set to the parameters.
Setting Signal Name Function
0RL
1RM
2RH
Operation using multi-speed (speeds 1 to 7) setting or remote setting
function
Refer to: 8.3.2 Variable-speed operation using contact input signals
3RT
Second function
Refer to: 8.5.2 Acceleration time and deceleration time
4AU
Selection of current input speed command
Refer to: 8.3.1 Selection of the analog speed command specifications
5JOG
JOG operation mode selection
Refer to: 8.6.1 JOG operation
7OH
The "external fault" protective function is activated when the external
contact connected across terminals OH-SD "opens".
Refer to: Chapter 6, 6.1.1 Protective function activated
8REX
Operation using multi-speed (speeds 8 to 15) setting
Refer to: 8.3.2 Variable-speed operation using contact input signals
9X9
Third function
Refer to: 8.5.2 Acceleration time and deceleration time
10 X10 For connection of high power factor converter
12 X12
PU operation external interlock
Refer to: Pr. 79 [Section 8.2]
14 X14
PID control operation cancel
Refer to: 8.6.3 PID control operation
16 X16
PU operation-external operation switching
Refer to :Pr. 79 [Section 8.2]
24 MRS
Same function as that of the contact input terminal MRS.
Refer to: Chapter 3, 3.3.1 Terminals
9999
No function
MEMO
When the remote setting function (Pr. 59 = 1, 2 [Section 8.3.2]) has been set, the
RL, RM and RH terminals provide the remote setting function.
You can assign one function to two or more terminals. In this case, the function is
performed by the logical add of the terminal inputs.
The priority of the speed commands is in order of JOG, multi-speed operation,
current input (AU) operation, and voltage input operation.