



















8 PARAMETER FUNCTIONS
8-36
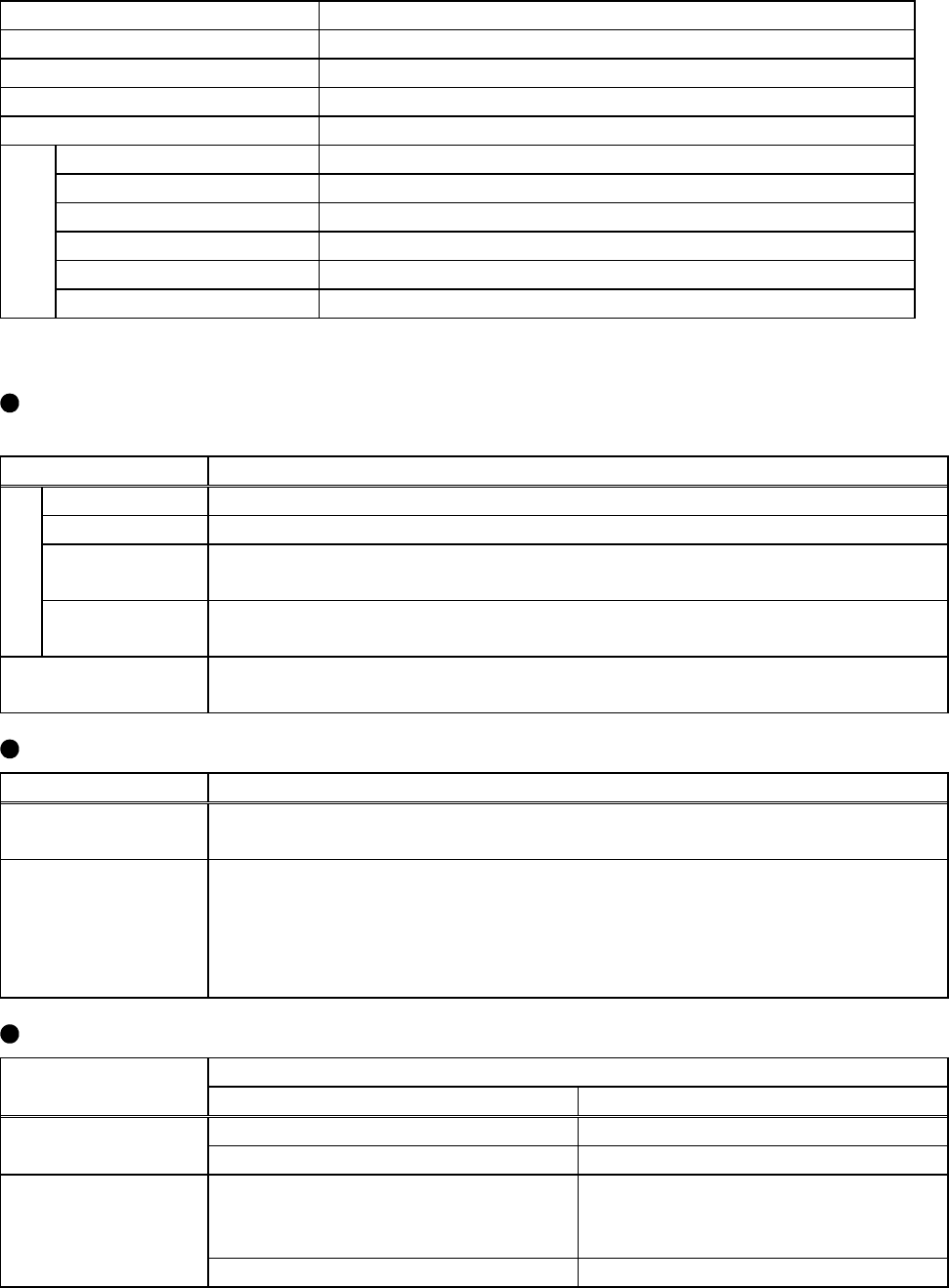
(1) Communication specifications
Conforming standard RS-485 Standard conformance
Number of units connected 1 : N (max. 32 units)
Communication speed Selected between 19200, 9600 and 4800bps
Control protocol Asynchronous
Communication method Half-duplex
Character system ASCII (7 bits/8 bits) selectable
Stop bit length Selectable between 1 bit and 2 bits.
Terminator CR/LF presence/absence selectable
Parity check Selectable between presence (even/odd) and absence
Sumcheck Presence
Communication
data
Waiting time setting Selectable between presence and absence
(2) Communication operation functions
Setting a value other than 0 in Pr. 122 enables RS-485 communication with the computer
connected to the PU connector, allowing you to make operation and parameter settings.
Setting Item Description
Start Give a forward rotation operation, reverse rotation operation or stop command.
Speed setting Set the running speed.
Monitor
You can read the motor speed, motor current, output voltage, drive unit fault,
or control circuit output terminal assignment function activated.
Operation
Reset
Used to reset the drive unit. A reset from the terminal RES is also valid.
Reset operation is performed as set in Pr. 188 [Section 8.4].
Parameter write and
read
You can change or read each parameter value.
Parameter write is performed as set in Pr. 77 [Section 8.1].
You can select the operation mode through communication.
Operation Mode Description
Communication
operation mode
Operation and parameter write/read are performed through communication.
External operation
mode
Start and speed setting are made using the input signals from the control
circuit terminals. Setting external/PU combined operation 1 in the operation
mode selection (Pr. 79 [Section 8.2]) enables speed setting through
communication. Though monitor and parameter read can be performed
through communication, parameter write cannot be performed.
The following operation is performed when a communication operation fault occurs.
Operation
Location of Fault
Occurrence
Communication operation mode External operation mode
Motor operation stopped Motor operation stopped
Drive unit
Communication continued Communication continued
Whether motor operation is stopped
or continued depends on the Pr. 75
[Section 8.2] setting.
Motor operation continued
Communication
(Computer or
communication
cable)
Communication stopped Communication stopped