



















8 PARAMETER FUNCTIONS
8-25
8
Initial value
Pr. 31 to 36 "speed command jumps 1A to 3B" 9999
Pr.
A point
side
B point
side
Setting Range Unit
31 32 0 to 3000, 9999 r/min
33 34 0 to 3000, 9999 r/min
35 36 0 to 3000, 9999 r/min
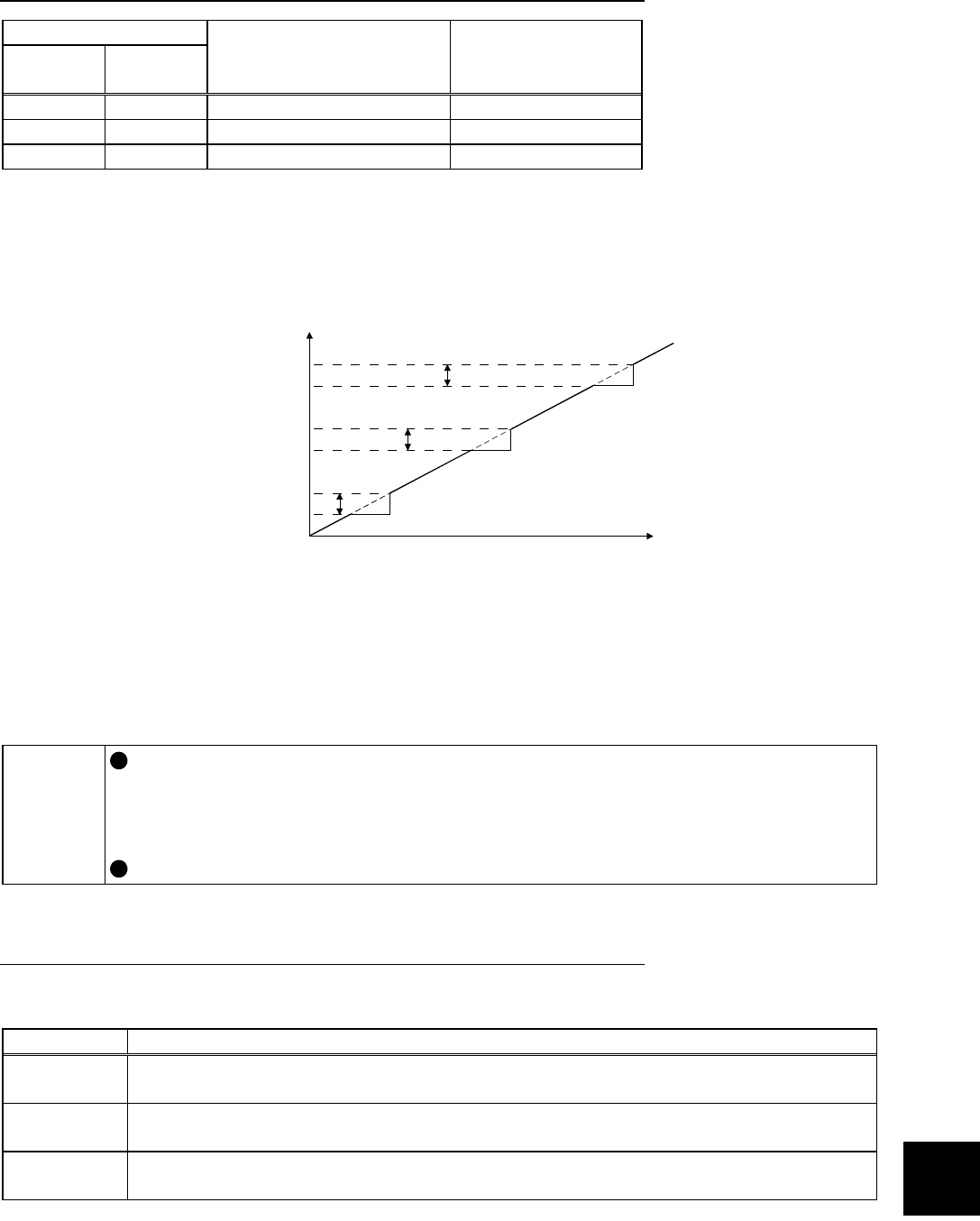
You can set up to three speed areas where continuous operation will be disabled. You can avoid
continuous operation at the speed at which resonance will occur due to the natural frequency of a
mechanical system. When the speed command within the setting range is input, continuous
operation is performed at the preset speed of value A.
Setting "9999" in the parameter makes this function invalid.
Pr. 31(1A)
Pr. 32(1B)
Pr. 33(2A)
Pr. 34(2B)
Pr. 35(3A)
Pr. 36(3B)
Speed jump
Running speed
<Setting example 1>
When you set 500 (r/min) in Pr. 31 and 700 (r/min) in Pr. 32, the running speed is 500 (r/min) if
the speed command is between the range of 500 to 700 (r/min).
<Setting example 2>
When you set 700 (r/min) in Pr. 31 and 500 (r/min) in Pr. 32, the running speed is 700 (r/min) if
the speed command is between the range of 500 to 700 (r/min).
MEMO
The "speed command jump" function is designed to disable continuous operation
between the preset A and B points. When the running speed command is outside A-
B, the speed varies between A and B in accordance with the preset
acceleration/deceleration time.
A setting less than the Pr. 13 value will be a stop (0r/min) setting.
Initial value
Pr. 78 "reverse rotation prevention selection" 0
You can fix the direction of rotation.
Setting Function
0
Forward or reverse rotation operation is performed in accordance with the forward
or reverse rotation command.
1
Forward rotation operation is performed in accordance with the forward rotation
command. Operation is stopped in response to the reverse rotation command.
2
Reverse rotation operation is performed in accordance with the reverse rotation
command. Operation is stopped in response to the forward rotation command.