



















8 PARAMETER FUNCTIONS
8-43
8
4) Sumcheck
As a sumcheck value, set the lower 1 byte (8 bits) of the sum derived from ASCII data (station
number, instruction code, waiting time, data code) except the control code. The
communication data is converted into ASCII automatically.
ENQ
0 1
E 1
1 0 7 A D F 4
(H05)
H30 H31
H45 H31 H31
H30 H37 H41 H44
(H46 H34)
Sumcheck
Data
Binary code
ASCII code
Station
Number
Instruction
Code
Waiting
Time
Data Code
Sumcheck value calculation: H30+31+45+31+31+30+37+41+44=H1F4
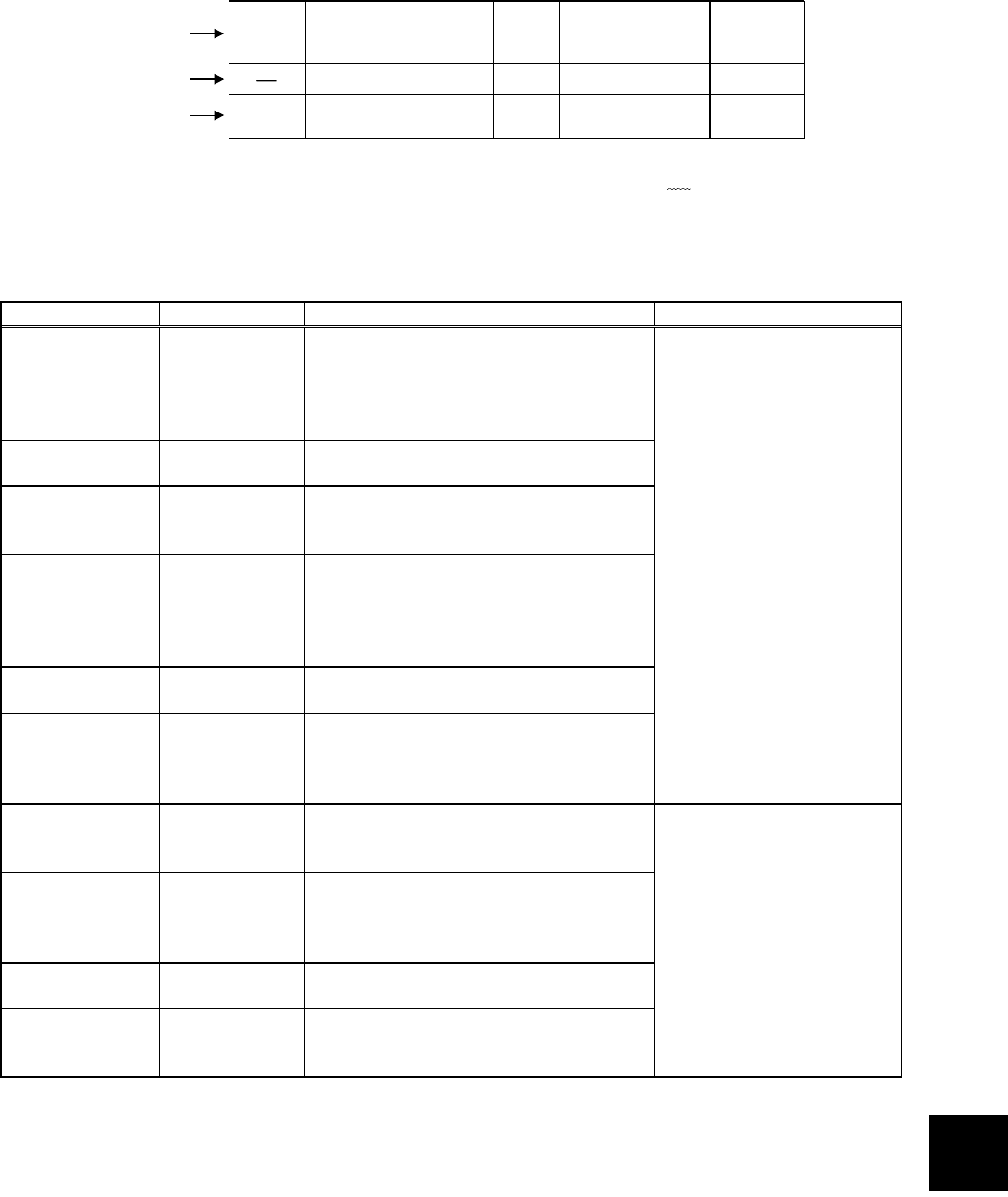
5) Error codes
When the data received by the drive unit is in error, the error code is returned to the computer.
The definitions of the error codes are as follows.
Error Code Error Item Error Definition Drive Unit Operation
H0
Computer
NAK error
The number of errors consecutively
detected in communication request
data from the computer is greater
than the permissible number of
retries.
H1 Parity error
The parity check result does not
match the specified parity.
H2
Sumcheck
error
The sumcheck value in the computer
does not match that of the data
received by the drive unit.
H3 Protocol error
Data received by the drive unit is in
the wrong protocol, data receive is
not completed within the given time,
or CR and LF are not as set in the
parameter.
H4 Framing error
The stop bit length differs from the
initial setting.
H5 Overrun
New data has been sent by the
computer before the drive unit
completes receiving the preceding
data.
If errors occur
consecutively more than
the permissible number of
communication retries
(Pr. 121 setting), the drive
unit displays E. PUE and
comes to an alarm stop.
H7
Character
error
The character received is invalid
(other than 0 to 9, A to F, control
code).
HA Mode error
Parameter write was attempted in
other than the computer link
operation mode or during drive unit
operation, for example.
HB
Instruction
code error
The specified command does not
exist.
HC
Data range
error
Invalid data has been specified for
parameter write, running speed write,
etc.
The receive data is made
invalid and the drive unit
continues operation.