



















8 PARAMETER FUNCTIONS
8-45
8
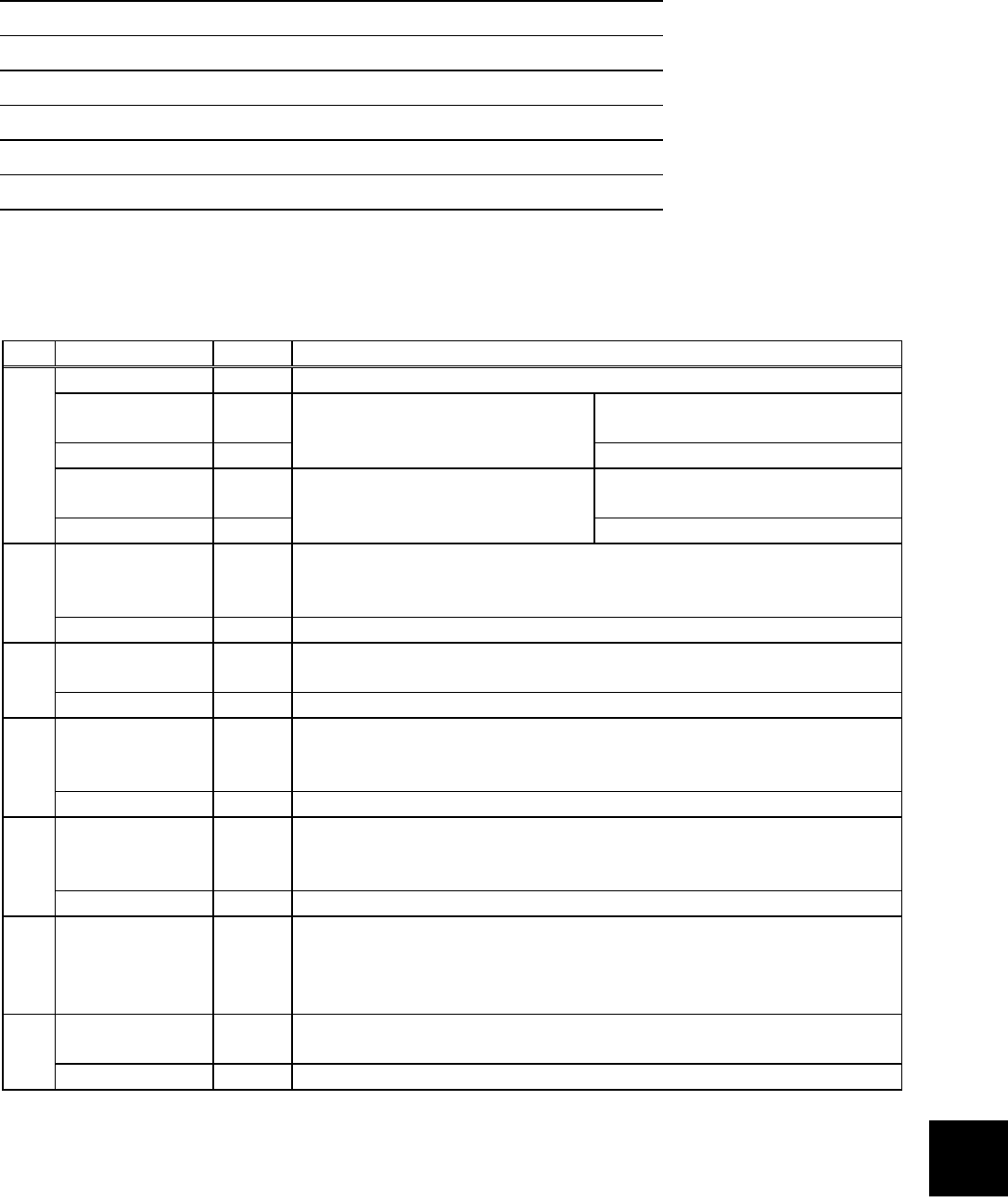
8.6.3 PID control operation
Initial value
Pr. 128 "PID action selection" 0
Pr. 129 "PID proportional band" 100
Pr. 130 "PID integral time" 1
Pr. 131 "upper limit" 9999
Pr. 132 "lower limit" 9999
Pr. 133 "PID action set point for PU operation" 0
Pr. 134 "PID differential time" 9999
This function feeds back a voltage, air volume, pressure or like as a process value to control the
motor speed so that the difference between the set point and process value, i.e. deviation value, is
zeroed.
Pr. Setting Range Unit Description
0
No PID action
10
PID reverse action (heating,
pressure, etc.)
11
When deviation signal is input
PID forward action (cooling, etc.)
20
PID reverse action (heating,
pressure, etc.)
128
21
When set point and process
value are input
PID forward action (cooling, etc.)
0.1 to 1000 %
As the setting is smaller, the manipulated variable varies greatly
with a slight change of the process value. Hence, the response
sensitivity improves but stability deteriorates, e.g. hunting occurs.
129
9999
No proportional control
0.1 to 3600 s
As the setting is smaller, the set point is reached faster but
stability deteriorates, e.g. hunting occurs.
130
9999
No integral control
0.0 to 100.0 %
Set the upper limit of the process value.
If the process value exceeds the setting, the FUP signal assigned
to the control circuit output terminal is output.
131
9999
No upper limit setting
0.0 to 100.0 %
Set the lower limit of the process value.
If the process value falls below the setting, the FDN signal
assigned to the control circuit output terminal is output.
132
9999
No lower limit setting
133 0.00 to 100.0 %
Only valid for the PU command in the PU operation or PU/external
combined operation mode.
Pr. 902 [Section 8.3.1] corresponds to 0% and Pr. 903 [Section
8.3.1] to 100%.
0.01 to 10.00 s
As the setting is larger, greater response is made to a deviation
signal variation.
134
9999
No differential control