


















Rosemount Model 8800C Vortex Flowmeter with FOUNDATION
TM
Fieldbus
C-4
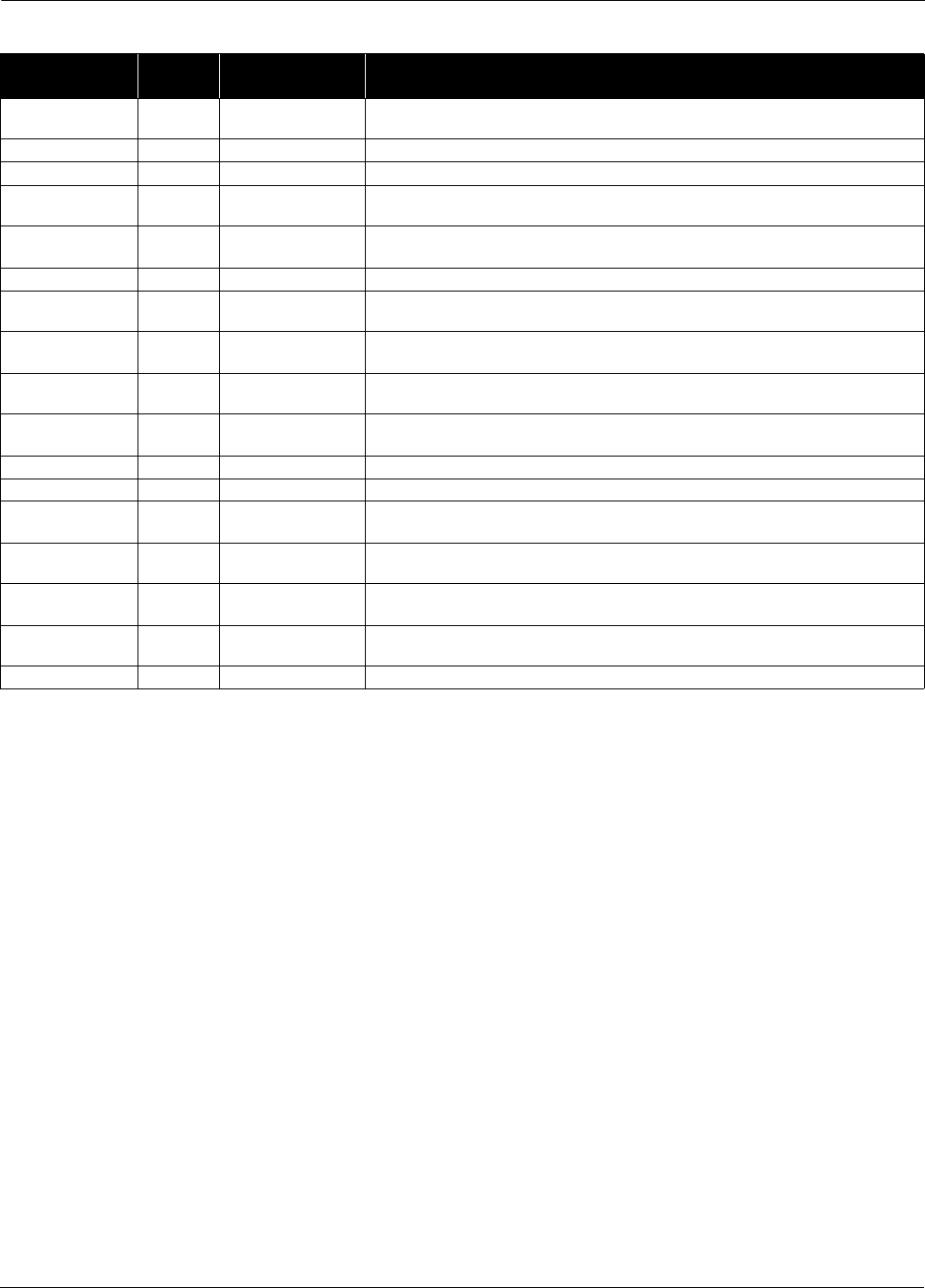
SP_FTIME 69 Seconds The time constant of the first-order SP filter. It is the time required for a 63 percent
change in the IN value.
SP_HI_LIM 21 EU of PV_SCALE The highest SP value allowed.
SP_LO_LIM 22 EU of PV_SCALE The lowest SP value allowed.
SP_RATE_DN 19 EU of PV_SCALE
per second
Ramp rate for downward SP changes. When the ramp rate is set to zero, the SP
is used immediately.
SP-RATE_UP 20 EU of PV_SCALE
per second
Ramp rate for upward SP changes. When the ramp rate is set to zero,
the SP is used immediately.
SP_WORK 68 EU of PV_SCALE The working setpoint of the block after limiting and filtering is applied.
STATUS_OPTS 14 None Allows you to select options for status handling and processing. The supported
status option for the PID block is Target to Manual if Bad IN.
STRATEGY 03 None The strategy field can be used to identify grouping of blocks. This data is not checked
or processed by the block.
ST_REV 01 None The revision level of the static data associated with the function block. The revision
value will be incremented each time a static parameter value in the block is changed.
STRUCTURE.
CONFIG
75 None Defines PID equation structure to apply controller action.
TAG_DESC 02 None The user description of the intended application of the block.
TRK_IN_D 38 None Discrete input that initiates external tracking.
TRK_SCALE 37 None The high and low scale values, engineering units code, and number of digits to the
right of the decimal point associated with the external tracking value (TRK_VAL).
TRK_VAL 39 EU of TRK_SCALE The value (after scaling from TRK_SCALE to OUT_SCALE) APPLIED to OUT in LO
mode.
UBETA 72 Percent Used to set disturbance rejection vs. tracking response action for a 2.0 degree of
freedom PID.
UGAMMA 71 Percent Used to set disturbance rejection vs. tracking response action for a 2.0 degree of
freedom PID.
UPDATE_EVT 43 None This alert is generated by any changes to the static data.
TABLE C-1. PID Function Block System Parameters.
Parameter
Index
Number
Units Description