



















B-7
Analog Input (AI) Function Block
• Out of Service (O/S) The block is not processed. FIELD_VAL
and PV are not updated and the OUT status is set to Bad: Out of
Service. The BLOCK_ERR parameter shows Out of Service. In
this mode, you can make changes to all configurable parameters.
The target mode of a block may be restricted to one or more of the
supported modes.
Alarm Detection A block alarm will be generated whenever the BLOCK_ERR has an
error bit set. The types of block error for the AI block are defined above.
Process Alarm detection is based on the OUT value. You can configure
the alarm limits of the following standard alarms:
•High (HI_LIM)
• High high (HI_HI_LIM)
•Low (LO_LIM)
• Low low (LO_LO_LIM)
In order to avoid alarm chattering when the variable is oscillating
around the alarm limit, an alarm hysteresis in percent of the PV span
can be set using the ALARM_HYS parameter. The priority of each
alarm is set in the following parameters:
•HI_PRI
•HI_HI_PRI
•LO_PRI
•LO_LO_PRI
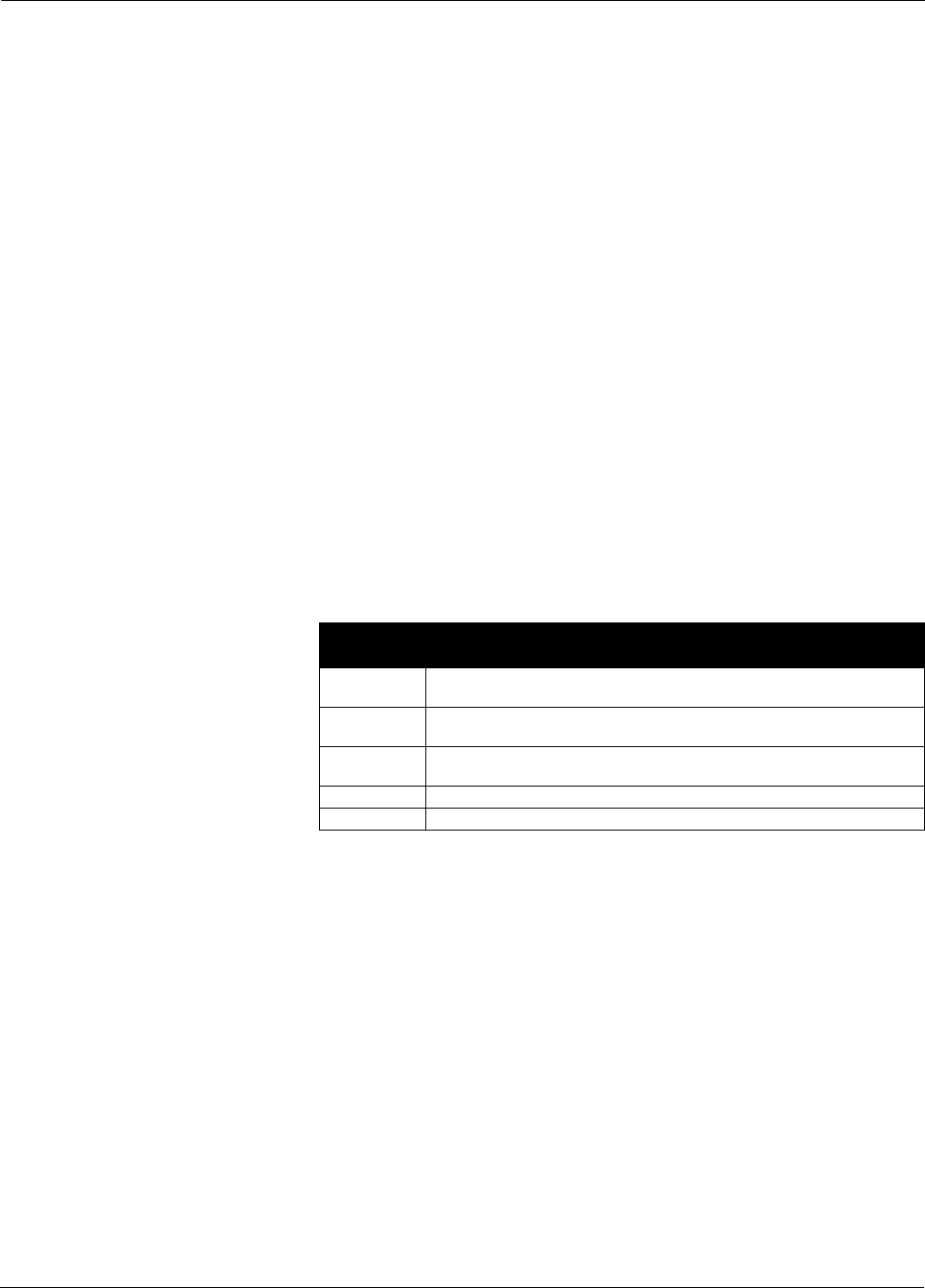
Alarms are grouped into five levels of priority:
Status Handling Normally, the status of the PV reflects the status of the measurement
value, the operating condition of the I/O card, and any active alarm
condition. In Auto mode, OUT reflects the value and status quality of
the PV. In Man mode, the OUT status constant limit is set to indicate
that the value is a constant and the OUT status is Good.
The Uncertain - EU range violation status is always set, and the PV
status is set high- or low-limited if the sensor limits for conversion are
exceeded.
In the STATUS_OPTS parameter, you can select from the following
options to control the status handling:
BAD if Limited – sets the OUT status quality to Bad when the value
is higher or lower than the sensor limits.
Uncertain if Limited – sets the OUT status quality to Uncertain
when the value is higher or lower than the sensor limits.
Uncertain if in Manual mode – The status of the Output is set to
Uncertain when the mode is set to Manual
Priority
Number
Priority Description
0 The priority of an alarm condition changes to 0 after the condition that caused the
alarm is corrected.
1 An alarm condition with a priority of 1 is recognized by the system, but is not
reported to the operator.
2 An alarm condition with a priority of 2 is reported to the operator, but does not
require operator attention (such as diagnostics and system alerts).
3-7 Alarm conditions of priority 3 to 7 are advisory alarms of increasing priority.
8-15 Alarm conditions of priority 8 to 15 are critical alarms of increasing priority.