


















C-3
PID Function Block
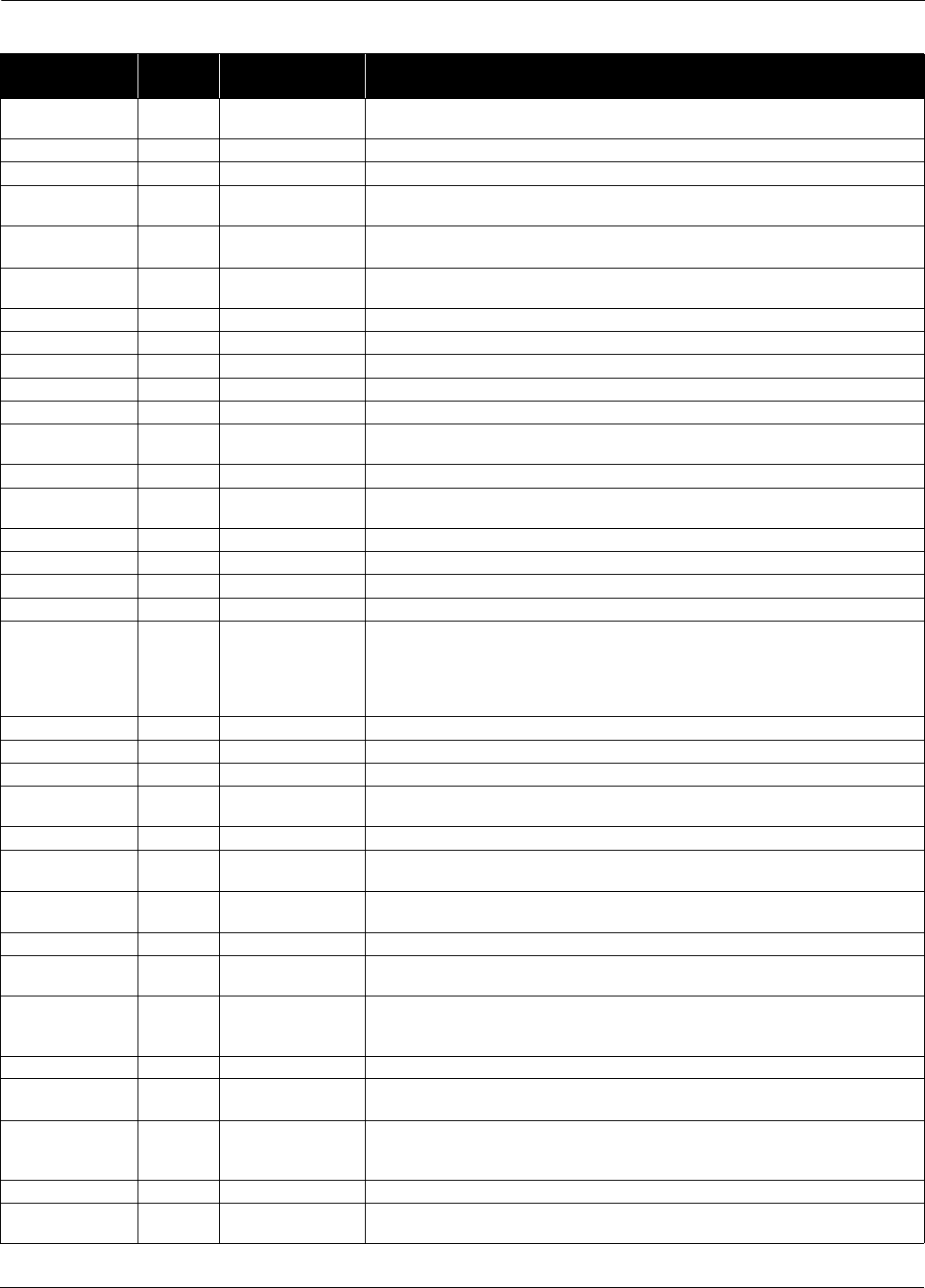
FF_SCALE 41 None The high and low scale values, engineering units code, and number of digits to the
right of the decimal point associated with the feedforward value (FF_VAL).
FF_VAL 40 EU of FF_SCALE The feedforward control input value and status.
GAIN 23 None The proportional gain value. This value cannot = 0.
GRANT_DENY 12 None Options for controlling access of host computers and local control panels to
operating, tuning, and alarm parameters of the block. Not used by the device.
HI_ALM 61 None The HI alarm data, which includes a value of the alarm, a timestamp of occurrence,
and the state of the alarm.
HI_HI_ALM 60 None The HI HI alarm data, which includes a value of the alarm, a timestamp of
occurrence, and the state of the alarm.
HI_HI-LIM 49 EU of PV_SCALE The setting for the alarm limit used to detect the HI HI alarm condition.
HI_HI_PRI 48 None The priority of the HI HI Alarm.
HI_LIM 51 EU of PV_SCALE The setting for the alarm limit used to detect the HI alarm condition.
HI_PRI 50 None The priority of the HI alarm.
IN 15 EU of PV_SCALE The connection for the PV input from another block.
LO_ALM 62 None The LO alarm data, which includes a value of the alarm, a timestamp of occurrence,
and the state of the alarm.
LO_LIM 53 EU of PV_SCALE The setting for the alarm limit used to detect the LO alarm condition.
LO_LO_ALM 63 None The LO LO alarm data, which includes a value of the alarm, a timestamp of
occurrence, and the state of the alarm.
LO_LO_LIM 55 EU of PV_SCALE The setting for the alarm limit used to detect the LO LO alarm condition.
LO_LO_PRI 54 None The priority of the LO LO alarm.
LO_PRI 52 None The priority of the LO alarm.
MATH_FORM 73 None Selects equation form (series or standard).
MODE_BLK 05 None The actual, target, permitted, and normal modes of the block.
Target: The mode to “go to”
Actual: The mode the “block is currently in”
Permitted: Allowed modes that target may take on
Normal: Most common mode for target
OUT 09 EU of OUT_SCALE The block input value and status.
OUT_HI_LIM 28 EU of OUT_SCALE The maximum output value allowed.
OUT-LO_LIM 29 EU of OUT_SCALE The minimum output value allowed
OUT_SCALE 11 None The high and low scale values, engineering units code, and number of digits to the
right of the decimal point associated with OUT.
PV 07 EU of PV_SCALE The process variable used in block execution.
PV_FTIME 16 Seconds The time constant of the first-order PV filter. It is the time required for a 63 percent
change in the IN value.
PV_SCALE 10 None The high and low scale values, engineering units code, and number of digits to the
right of the decimal point associated with PV.
RATE 26 Seconds The derivative action time constant.
RCAS_IN 32 EU of PV_SCALE Target setpoint and status that is provided by a supervisory host. Used when mode
is RCAS.
RCAS_OUT 35 EU of PV_SCALE Block setpoint and status after ramping, filtering, and limiting that is provided to a
supervisory host for back calculation to allow action to be taken under limiting
conditions or mode change. Used when mode is RCAS.
RESET 24 Seconds per repeat The integral action time constant.
ROUT_IN 33 EU of OUT_SCALE Target output and status that is provided by a supervisory host. Used when mode is
ROUT.
ROUT_OUT 36 EU of OUT_SCALE Block output that is provided to a supervisory host for a back calculation to allow
action to be taken under limiting conditions or mode change. Used when mode is
RCAS.
SHED_OPT 34 None Defines action to be taken on remote control device timeout.
SP 08 EU of PV_SCALE The target block setpoint value. It is the result of setpoint limiting and setpoint
rate of change limiting.
TABLE C-1. PID Function Block System Parameters.
Parameter
Index
Number
Units Description