Operation Chapter 3
SMART-MR10/15 User Manual Rev 5 55
3.6 Emulated Radar (ER)
A typical radar sensor emits radio beams that bounce off the ground, and computes ground speed
based on the speed at which objects are passing in front of the sensor. The output of the sensor is a
digital pulse, the frequency of which is proportional to the vehicle’s ground speed. This is often used
in agricultural applications such as planting and spraying. The SMART-MR10/15 eliminate the need
for separate ground-sensing radar equipment by converting the GPS-derived velocity to proportional
frequency output. The following emulated radar signal parameters can be configured by the customer:
• Frequency Step: Specifies how the frequency output relates to the vehicle speed.
• Signal Update Rate: Specifies how often the frequency output is updated to match the vehicle
speed.
• Response Mode: Specifies how quickly changes in velocity are reflected in the frequency output.
Setting a slower response mode reduces spikes (noise) in the velocity but increases latency.
Setting a higher response mode reduces latency, but may result in noisier frequency output. Refer
to Appendix B.12, RADARCFG Configure the ER output starting on page 104 for more detailed
information.
Once it is configured using the RADARCFG command (see page 104), Emulated Radar (ER) pulses
are output through the SMART-MR10/15 cables (see Table 11 on page 84) and the RADARSIGNAL
log (see page 119).
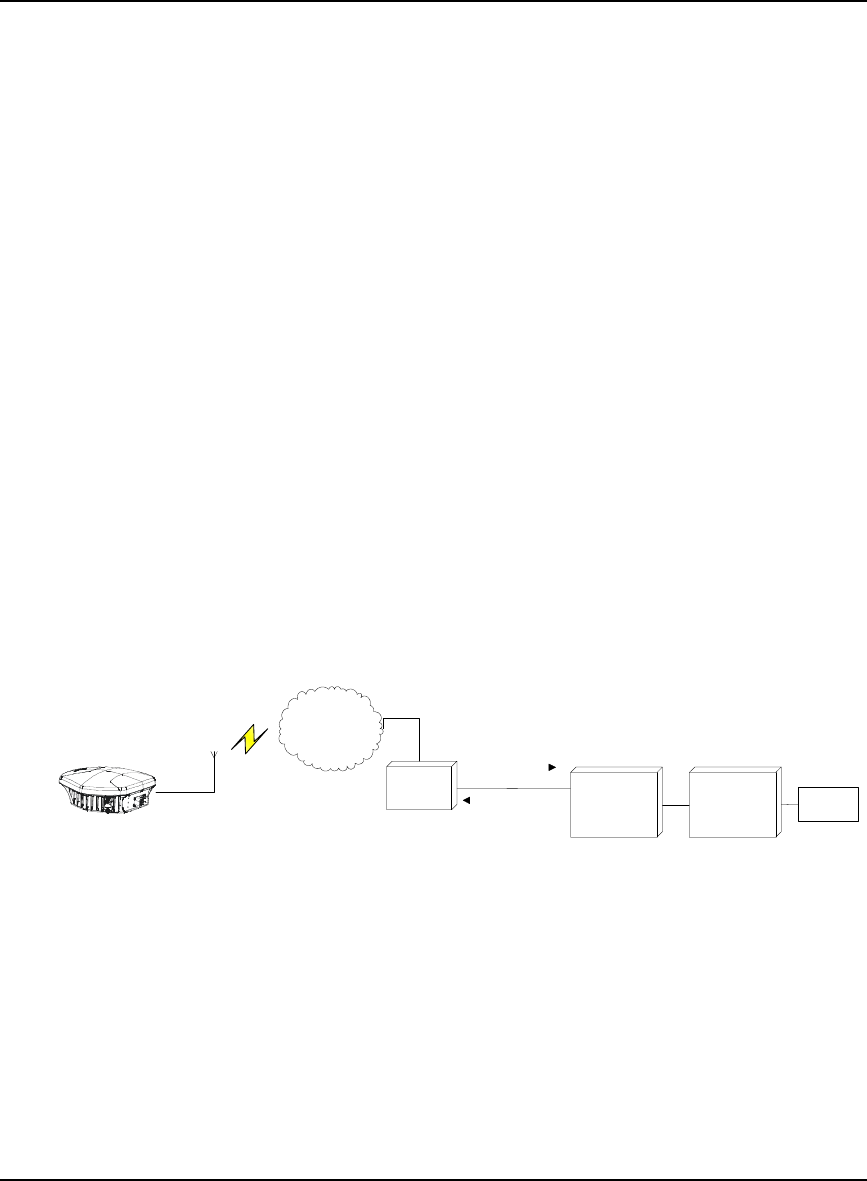
3.7 NTRIP Client
In this configuration, shown in Figure 16, a vehicle-mounted SMART-MR15 acts as a rover using
network RTK via NTRIP. To access NTRIP servers, the SMART-MR15 uses a built-in TCP/IP-
capable cellular modem and NTRIP client software.
Figure 16: NTRIP Client Configuration
NTRIP Corrections
over
TCP/IP
NTRIP
Caster
NTRIP
Server
(example,
CORS)
Wireless
Network
Wireless
Gateway
NTRIP Requests
(typically GPGGA)
NTRIP Corrections
over TCP/IP
NTRIP
Source





































































































































