JKSSS+ Series - 48
JKSSS+ Series 2.3 - 4.2KV
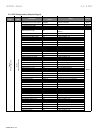
SP.2StarterConguration(SetpointPage2)
Provides multiple choices for starting ramps that can be
selected for particular loads and applications.
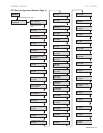
Start Ramp 1, Jog, Start
Disabled, Tach Ramp, Custom Accel Curve, Dual
Ramp, Start Ramp 2.
The dual ramp mode works in
conjunction with External Input #3. This allows
the user to switch between the two start ramps
without having to recongure the start mode. (For
details on conguring External Input #3 for DUAL
RAMP see Setpoint Page 6.)
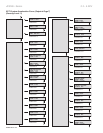
Allows the user to
custom design the acceleration start curve to the
application. (See setpoint page 7 for conguration
setup.) Note: If Custom Accel Curve has not
been enabled in setpoint page 7, the soft starter
will ignore the start control mode and read this
setpoint as disabled.
See setpoint page 6 for conguration
setup of tachometer input.
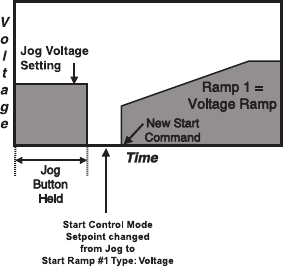
The voltage level necessary to cause
the motor to slowly rotate.
The ramp type can be setup for
either Voltage or Current. If Voltage is selected,
initial voltage, ramp time and current limit are
adjustable. If Current is selected, initial current,
ramp time and maximum current are adjustable.
is the most reliable starting
method, because the starter will eventually
reach an output
voltage high enough to
draw full current and
develop full torque.
This method is useful
for applications where
the load conditions
change frequently and
where different levels
of torque are required.
Typical applications
include material handling
conveyors, positive
displacement pumps and drum mixers.
Voltage is increased from a starting point (Initial
Torque) to full voltage over an adjustable period of
time (Ramp Time). To achieve Voltage Ramping,
select VOLTAGE for the START RAMP #1 TYPE
setpoint and set CURRENT LIMIT #1 setpoint
to 500% (the maximum setting). Since this is
essentially Locked Rotor Current on most motors,
there is little or no Current Limit effect on the
Ramp prole.
• is the most
used curve and is similar to voltage ramping.
However, it adds an adjustable maximum current
output. Voltage is increased gradually until the
setting of the Maximum Current Limit setpoint
is reached. The voltage is held at this level until
the motor accelerates to full speed. This may be
necessary in applications where the electrical
power is limited. Typical applications include
portable or emergency generator supplies, utility
power near the end of a transmission line and
utility starting power demand restrictions. Note:
Using Current Limit will override the Ramp Time
setting if necessary, so use this feature when
acceleration time is not critical. To achieve Voltage
Ramping with Current Limit, select VOLTAGE for
the START RAMP #1 setpoint and set CURRENT
LIMIT #1 setpoint to a desired lower setting, as
determined by your application requirements.
(Closed Loop Torque Ramping)
is used for smooth linear acceleration of output
torque. This ramp is only used on some conveyor
systems (long haul or down hill). Output voltage
is constantly updated to provide the linear
current ramp, and therefore the available torque
is maximized at any given speed. This is for
applications where rapid changes in torque may
result in load damage or equipment changes.
Typical applications include overland conveyors
if belt stretching occurs; fans and mixers if blade
warping is a problem; and material handling
systems if stacked products fall over or break.
This feature can be used with or without the
Maximum Current Limit setting. To achieve
Current Ramping select CURRENT for START
RAMP #1 TYPE setpoint and the MAXIMUM
CURRENT #1 setpoint to the desired level.
(Current Step) start uses the
Current Limit feature exclusively. This method of
starting eliminates the soft start voltage/current
ramp and instead, maximizes the effective
application of motor torque within the limits of the
motor. In this mode, setpoint RAMP TIME #1 is
set to zero (0), so the output current jumps to the
current limit setting immediately. Typically used
in with a limited power supply, when starting a
difcult load such as a centrifuge or deep well
pump, when the motor capacity is barely adequate
(stall condition or overloading occurs) or if other
starting modes fail. Since ramp times are set to
zero (0). START RAMP #1 TYPE is set to either
VOLTAGE or CURRENT.
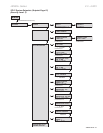
(
): Sets the initial start point of either