



















JKSSS+ Series - 23
JKSSS+ Series 2.3 - 4.2KV
TB3
#1
C
#12
NC
#11
NO
#10
C
#7
C
#8
NO
#9
NC
#6
NC
#5
NO
#4
C
#3
NC
#2
NO
TB2
#1
NO
#10
NC
#7
N
#8
C
#9
NO
#6
S
#5
NC
#4
NO
INTER
LOCK
#3
C
EMER BYP
SWITCH
CUST. POWER
OUTPUT
DELAYED
START
#2
O
• Positions 1 and 2 are for an emergency bypass contact. If a dry contact
closes position 1 and 2, this causes the CPU to be shut off
so there is no display. Then when a start is initiated, it pulls in the inline
isolation contactor which starts the motor across the line.
See section 3.6 for more details.
• Positions 3-4-5 are a FORM C contact. This is a dry contact that is
initiated by the emergency contact being closed. It provides indication
of the emergency bypass mode.
• Positions 6 and 7 is a customer connection for control power. Position
6 is the 120 Vac supply at (400 VA) and position 7 is the return.
• Positions 8-9-10 are a FORM C contact. The dry contact is a delayed start/
stop contact. The amount of delay is determined by X1, X2 and SW3. See
“Switch Positions” and “Jumper Selection” on the next page. Note: Additional
Time Delay to SP2 of the CPU programming.
• JP1 - Motor Protection Jumper. Removing jumper JP1 on the TCB Board will
allow the soft starter CPU to continue providing electronic motor protection while operating in the Emer-
gency Bypass Mode. If necessary to disable the CPU system during operation in Emergency Bypass, be
sure JP1 is placed over both pins and an external means of overload protection is used.
• Positions 1-2-3 and 4-5-6 are sets of FORM C contacts. These are dry
contacts that operate when a blown fuse indication is given or discon-
nect is open.
• Positions 7-8-9 and 10-11-12 are sets of FORM C contacts. These are
fault contacts that change state if any fault condition occurs.
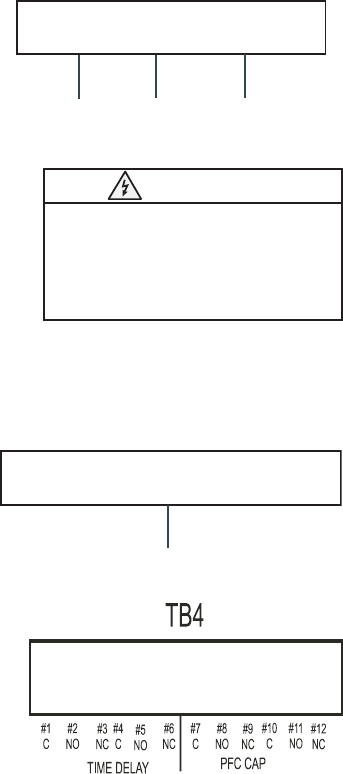
• Positions 1-2-3 and 4-5-6 are sets of FORM C contacts. These are aux-
iliary time delay contacts that will change state (after a delay) when the
Start contact is initiated. X3, X4 and SW4 determine the amount of delay.
(Switch Position and Jumper Selection on following page)
• Positions 7-8-9 and 10-11-12 are sets of FORM C contacts. These are
power factor correction capacitor (PFC) contacts to pull in an isolation con-
tactor for the capacitors (if required by the application). These will change
state when the At Speed contact is initiated. X5, X6 and SW5 determine the
amount of delay. See “Switch Positions” and “Jumper Selection” on
the following page. Note: This delay is in addition to SP2 of the CPU programming.
:
• Positions 1 and 2 are 120 VAC power supply to the Main and CPU circuit boards.
• Positions 3 and 4 are the start input connections to the Main and CPU circuit boards.
• Positions 5 and 6 are the fuse blown input connections to the Main and CPU circuit boards.
• Positions 7 and 8 are the Dual Ramp input connections to the Main and CPU circuit boards.
• Positions 9 and 10 are the Bypass Status input connections to the Main and CPU circuit boards.
• Positions 1 and 2 are the Run contacts (AUX 3) from the Main and CPU circuit boards to the TCB board.
This signal is used to hold the Main Contactor closed during deceleration.
• Positions 3 and 4 are the Main and CPU circuit board output connections to the TCB that signal the AUX1
Fault Status.
• Positions 5 and 6 are the At Speed contacts (AUX 4) from the Main and CPU circuit boards that signal the
Bypass Contactor to close.
• Position 7 has no connection..
• Positions 1 and 2 accept dry, normally closed contacts from blown fuse indicators and/or disconnect inter-
lock contact.
• Positions 3 and 4 accept dry, normally closed contacts from an external overload protection device (re-
quired if emergency bypass is used).
CAUTION
OVERLOAD PROTECTION LOSS
When operating the unit in Emergency Bypass Mode,
there is no electronic overload protection.
External overload protection must be provided for
continued safe operation.