



















164
How do GPS and dead reckoning work together?
For maximum accuracy, your Navigation System continually compares GPS data with your estimated
position as calculated from the data of 3D Hybrid Sensor. However, if only the data from the 3D Hybrid
Sensor is available for a long period, positioning errors are gradually compounded until the estimated
position becomes unreliable. For this reason, whenever GPS signals are available, they are matched with
the data of the 3D Hybrid Sensor and used to correct it for improved accuracy.
To ensure maximum accuracy, the dead reckoning system learns with experience. By comparing the
position it estimates with your actual position as obtained using GPS, it can correct for various types of
error, such as tire wear and the rolling motion of your car. As you drive, the dead reckoning system grad-
ually gathers more data, learns more, and the accuracy of its estimates gradually increases. So, after you
have driven some distance, you can expect your position as shown on the map to show fewer errors.
➲ If you use chains on your wheels for winter driving, or if you put on the spare wheel, the
errors may appear to suddenly increase because of the increased wheel diameter. To pre-
vent the contamination of previously acquired learning data, learning automatically stops
when such errors suddenly appear.
➲ There are two learning memories, so the Navigation System can learn about and compen-
sate for two different tire sets, such as summer and winter tires (see “Checking sensor
learning status and driving status” on page 86 for details).
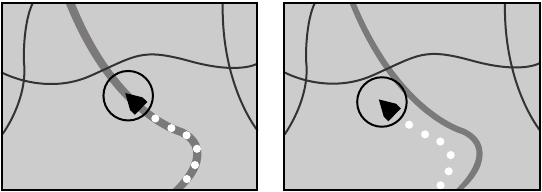
Map matching
As mentioned, the GPS and dead reckoning systems used by this Navigation System are susceptible to
certain errors. Their calculations may, on occasion, place you in a location on the map where no road
exists. In this situation, the processing system understands that cars travel only on roads, and can correct
your position by adjusting it to a nearby road. This is called map matching.
With map matching Without map matching