



















-
2
.
15-
000
010
020
030
040
050
060
070
080
090
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
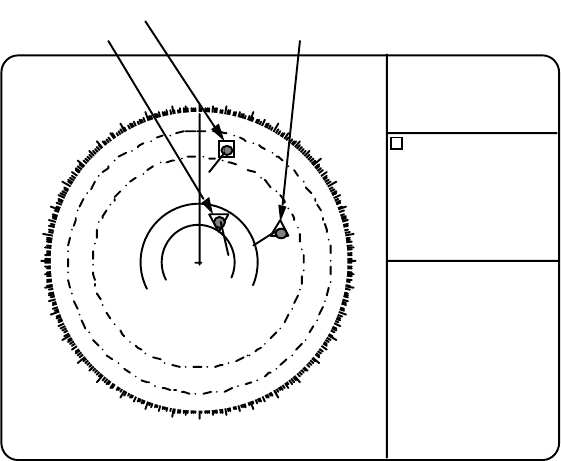
Guard Zone
Acquisition Zone
Target on collision course
Target in GZ
RNG 3.4 NM
BRG 25.5°R
CSE 264.0°R
SPD 12.3 KT
CPA 2.9 NM
TCPA 12.2MIN
BCR 1.7NM
BCT 20MIN
1
Target accessed for data readout
1
Target being accessed for data readout
is marked
□
1, 2 ,...etc.
RNG: Range from own ship to target
BRG: Bearing from own ship to target
in R (Relative) or T (True)
CSE: Course of target, True or
Relative
SPD: Speed of target
CPA: Closest Point of Approach of
target to own ship
TCPA: Time to CPA
BCR: Bow crossing range of target
BCT: Bow crossing time of target
2.10 Vector modes
Target vectors can be displayed relative to own ship's heading (Relative) or north (True).
Ground stabilization and Sea Stabilization
Target vectors can be ground stabilized or sea stabilized. Sea stabilization is a mode where
own ship and all targets are referenced to the sea using gyro heading and single axis log water
speed inputs in True Motion mode. Ground stabilization is a mode where own ship and all
targets are referenced to the ground using the ground track or set and drift inputs. If the
accuracy seems unsatisfactory, enter the set and drift correction (section 2.12).
True vector
Vector mode, True or Relative, is selected with the VECTOR key. With true vectors the radar
display will look like the one shown below.
In the true motion mode, all fixed targets such as land, navigational marks and ships at anchor
remain stationary on the radar screen with vector length zero. But in the presence of wind
and/or current, vectors appear on fixed targets representing the reciprocal of set and drift
affecting own ship unless set and drift values are properly entered.