



















-9.9-
Channel 1 output
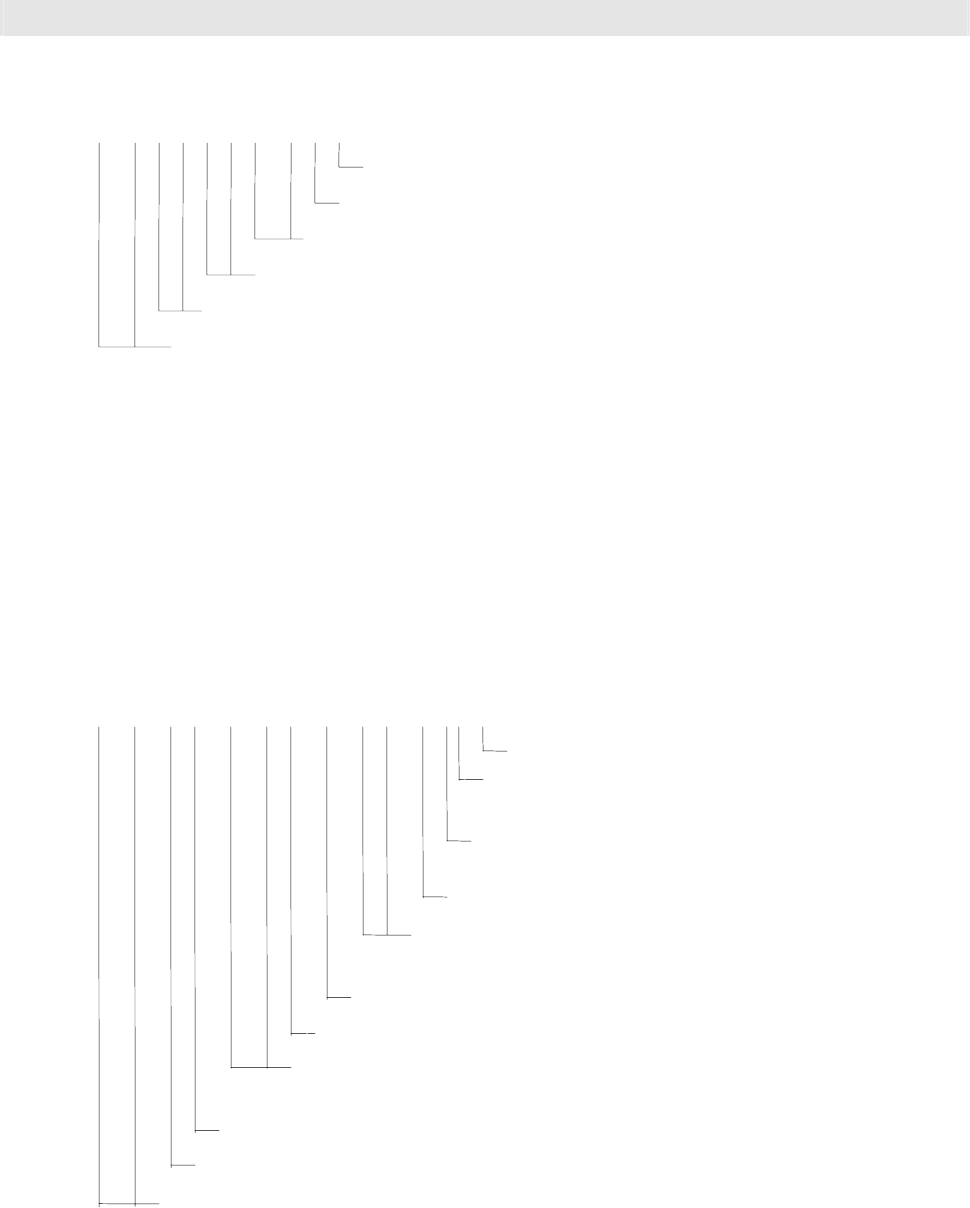
RAOSD - Own ship data
$RAOSD,x.x,A,x.x,a,x.x,a,x.x,x.x,a*hh<CR><LF>
Checksum
Speed units, K/N/S (N-type only)
Vessel set (degrees true), drift (speed)
Vessel speed (See below)
Vessel course (degrees true), Course reference (See below)
Heading (degrees true), Heading status (A = data valid, V = data invalid)
Reference systems (speed course)
B: Botom tracking log
M: Manully entered
W: Water referenced
R: Radar tracking (of fixed target)
P: Positing system ground reference
RARSD - Radar system data
$RARSD,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a,a*hh<CR><LF>
Checksum
Display rotation (C = course-up), H = head-up,
N = north-up)
Range units (K = km, N = nautical miles, S = statute
miles) (N-type only)
Range scale in use (0.125 - 120 nautical miles)
Cursor range and bearing from own ship (0.000 - 999.9
nautical miles, 0.0 - 359.9°)
Bearing line 2 (EBL2) (0.0 - 359.9°)
Variable range marker 2 range (VRM2) (0.000 - 999.9 nautical miles)
Origin 2 range and bearing from own ship (0.000 - 999.9 nautical miles,
0.0 - 359.9°)
Bearing line 1 (EBL1) (0.0 - 359.9°)
Variable range marker 1 range (VRM1) (0.000 - 999.9 nautical miles)
Origin 1 range and bearing from own ship (0.000 - 999.9 nautical miles, 0.0 - 359.9°)