



















Simrad AP50 Autopilot
90 20221032B
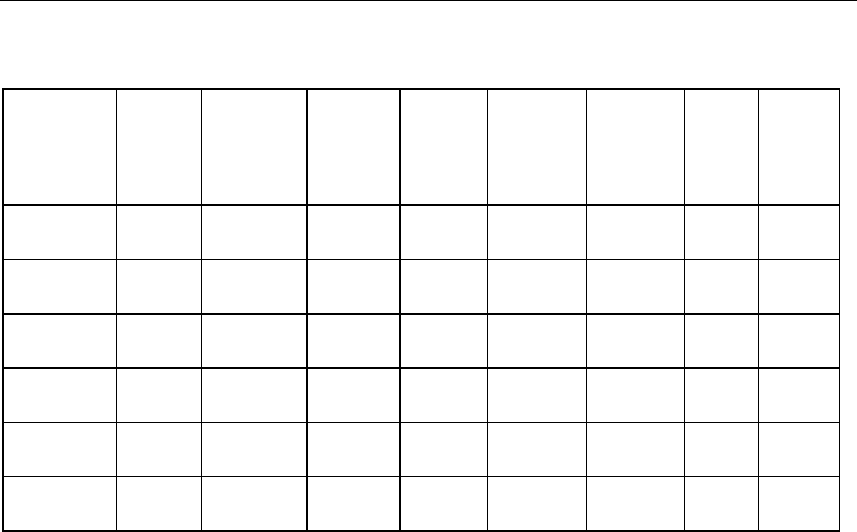
LINEAR DRIVE UNITS
MODEL MOTOR
VOLTS
JUNCTION
UNIT
MAX.
STROKE
mm (in.)
PEAK
THRUST
kg (lb.)
MAX.
RUDDER
TORQUE
Nm
(lb./in.)
HARD-
OVER
TIME
sec.
(30% load)
PWR.
CON-
SUMP.
TILLER
ARM
mm
(in.)
MLD200 12 J50 300 (11.8) 200
(440)
490
(4350)
15 1.5-6 A 263
(10.4)
HLD350 12 J50 200 (7.9) 350
(770)
610
(5400)
12 2.5-8 A 175
(6.9)
HLD2000L 12 J50 340 (13.4) 500
(1100)
1460
(12850)
19 3-10 A 298
(11.7)
HLD2000D 24 J50 200 (7.9) 1050
(2310)
1800
(15900)
11 3-10 A 175
(6.9)
HLD2000LD 24 J50 340 (13.4) 1050
(2310)
3180
(28000)
19 3-10 A 298
(11.7)
MSD50 12 J50 190 (17.5) 60
(132)
- 15 0.8-2 A -
Steering Gear Interface: Connects to Quadrant or Tiller.
Table 4-3 Linear Drive Units
Note !
1. The motor voltage is stepped down by the junction unit when
operating from 24 V or 32 V Mains (except for RPU1 and RPU3).
2. The specified junction unit is necessary to achieve maximum drive
unit capacity.
3. Recommended operational thrust or torque is 70% of the listed
value.
4. Typical average power consumption is 40% of the listed maximum
value.