



















(APA)
APB
BOD
BWW
BWC
BWR
RMB
XTE
XTR
GGA
GLL
RMA
RMC
VTG
*VBW
VHW
(DBK)
DBT
*DPT
MWV
(VWR)
*HDT
*HDG
(HDM)
*RSA
HSC
*HTD
Remarks:
NNNNNNNNNNNNNNI I I IIIICCCAAA
nnnnnnnnnppppp
Status fla
g
n/p= nav/pos data warning n n n n n p* p p p
* DGPS if flag=2
10
Nav Data
Destination wp position 2 1 3 10 45
Destination wp ident. 6 7 5 1 3 2 4 10 45
Origin wp ident. 3 1 2 10 45
Bearing wp-wp, T 3 4 2 1 10 45
Bearing wp-wp, M 3 4 2 1 10 45
Bearing pos-wp, T 4 2 1 3 10 45
Bearing pos-wp, M 3 2 1 10 45
Distance pos-wp 2 1 3 10 45
XTE 4 5 2 3 1
10-20 620
Position Data
Present position Lat, Long 4 1 2 3 20 60
COG, T 123 20 45
COG, M 1 20 45
Magnetic variation 3 2 5 6 4 1*
*Only applicable if received on set nav. source ch. 10 70
Speed Data Speed over ground (SOG) 1 2 3 21545
Speed through water (LOG) 2 1 na 15 45
Depth Data
Depth relative to transducer 123 na 45
Wind Data Apparent wind angle 21 na 45
Apparent wind speed 21 na 45
Heading Data
Compass heading, T 1** 3 2* TX
2
42
Compass heading, M 132TX
2
42
Rudder Data
Rudder angle TX 10
Rudder command TX
8
Rudder angle limit TX
8
Rudder status TX
8
Steering control Commanded heading T/M TX TX
8
Commanded ROT/radius TX
8
Selected steering mode TX
8
Off heading limit TX
8
Off heading status TX
8
RX:
J50-1, NI300X
xxxxxxxxxxxxxxxx*xxxxx
J50-2 xxxxxxxxxxxxxxxxxxxxx x x x
GI51 x* x*
x
x
x
.1 .1 .5 .2 .5 .5 .5 1* 1* 1 1 .1
5* 5* 1 5
55
10* 10* 1 1 .1
.1 .1 .5 .2 .5 .5 .5 1* 1* 1 1 .1
1** 10* 10*
10*
480 10
7
11 11
6
6
6
1
7
21
6
10
7
7
11 10 1
2
1
3
1
3
1
7
1
6
12 2
5
1
5
2
5
1
8
1
8
6
GI50
TX rate in Hz
* PS talker identifier (relative. heading)
* Calculated as magn. heading + magvar.
** Relative (geared synch./step) if PSIM identifier
* J50-1 will only read speed, not heading
New mess. priority
No data action
delay (sec)
* HDT if true, HDG if magn. steering compass
* Either true or magn. is calc. value if magvar is available
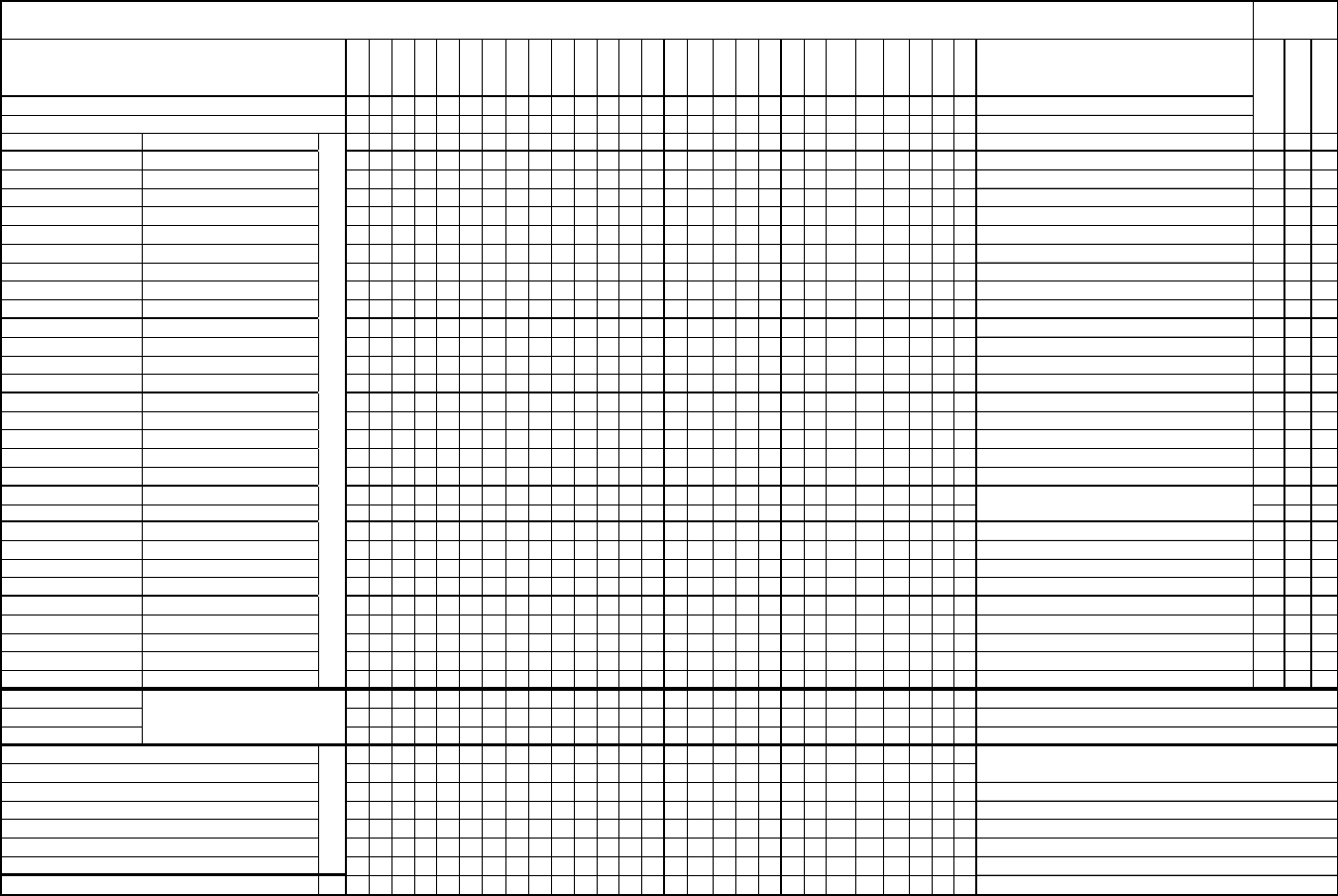
AP50 system, NMEA 183 messages
(applies for J50 and NI300X sw release V1R2 onwards)
NI300X
Sentence Formatter mnemonic code
Bold = recommended navigator/instr. output for autopilot
* = IMO designated ( ) = not for new designs
Data source:
(A=autop., C=comp., I=instr. system, N=navigator)
Accept. condition: No nav/pos (n/p) flag warning
Number gives RX priority (1 is lowest); TX if transmitt only; For * ref. column "Remarks"
* Option switch setting dependent
x = input messages accepted
TX stop
Alarm
Rev B
TX: J50-1, 1Hz Installation setup
J50-1, 5Hz Installation setup
J50-1, VDR Installation setup
Max sentence transmission rate (Hz)
*Abs. head. only.; **For rel. head: PSIM talker id. and 10Hz
GI51
* Either true or magn. is calc. value if magvar is available
J50-2