



















6. WAYPOINTS
6-3
Changing waypoint name, comment,
proximity alarm radius
1. If necessary, you can change the name
(up to 6 characters), comment (up to 13
characters), L/L position and the
proximity alarm radius (explained in detail
in Chapter 8) as follows:
a)
Select the NAME, COMMENT or
PROXIMITY ALARM RADIUS field.
b) Use the cursor pad to select character or
digit.
c) Enter appropriate data with the
alphanumeric keys. Each press an
alphanumeric key changes three alphabet
and one number.
Note: You cannot change shape and color of
a waypoint when it has a proximity
alarm radius entered. To change
shape or color, enter all zeroes as the
proximity alarm radius.
Changing waypoint position
1. Use the cursor pad to place the cursor in
the LAT LON field.
2. Operate the cursor pad to place the
cursor on digit to change. Enter
appropriate data with the alphanumeric
keys.
3. You can switch co-ordinates with the
N<-->S/E<-->W soft key.
Entering waypoints by range and
bearing
This method is useful when you want to
enter a waypoint using range and bearing to
a target found on a radar.
1. Press the [WPT/RTE] key to open the
WAYPOINT & ROUTE menu.
2. Press the WAYPOINTS soft key to open
the WAYPOINT menu.
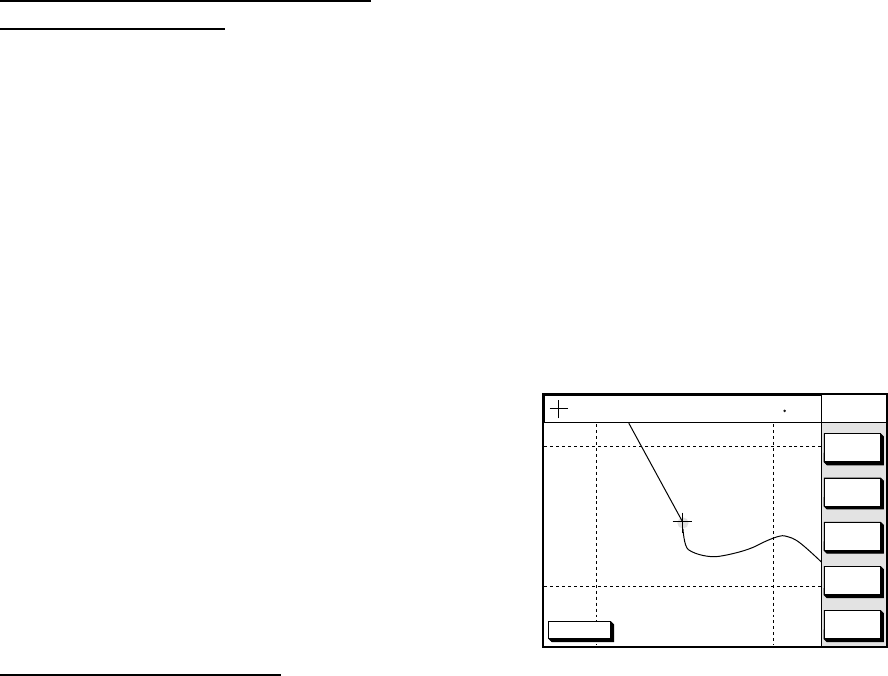
3. Press the WAYPOINT BY RANGE &
BEARING soft key. The plotter screen
appears.
DGPS 3D
RETURN
NEW
WPT
ZOOM
OUT
ZOOM
IN
WPT
RNG BRG
135° 12.345' E
34° 12.345' N
'X'
FROM
224.1
0.01nm
START
POINT
X
Plotter display, range and bearing selected
as waypoint entry method
4. Operate the cursor pad to place the
cursor on the location desired. The range
and bearing from own ship to cursor
appear at the top of the screen.
Note: The origin point of range and
bearing can be shifted to the place
you desire. Operate the cursor pad
to select location, and then press
the soft key START POINT. “X”
appears at the cursor position.
5. Press the NEW WPT soft key to display
the waypoint window.
6. If necessary, change data as you did in
“Entering waypoints by the cursor.”
7. Press the SAVE soft key to register the
waypoint.