



















1. OPERATIONAL OVERVIEW
1-5
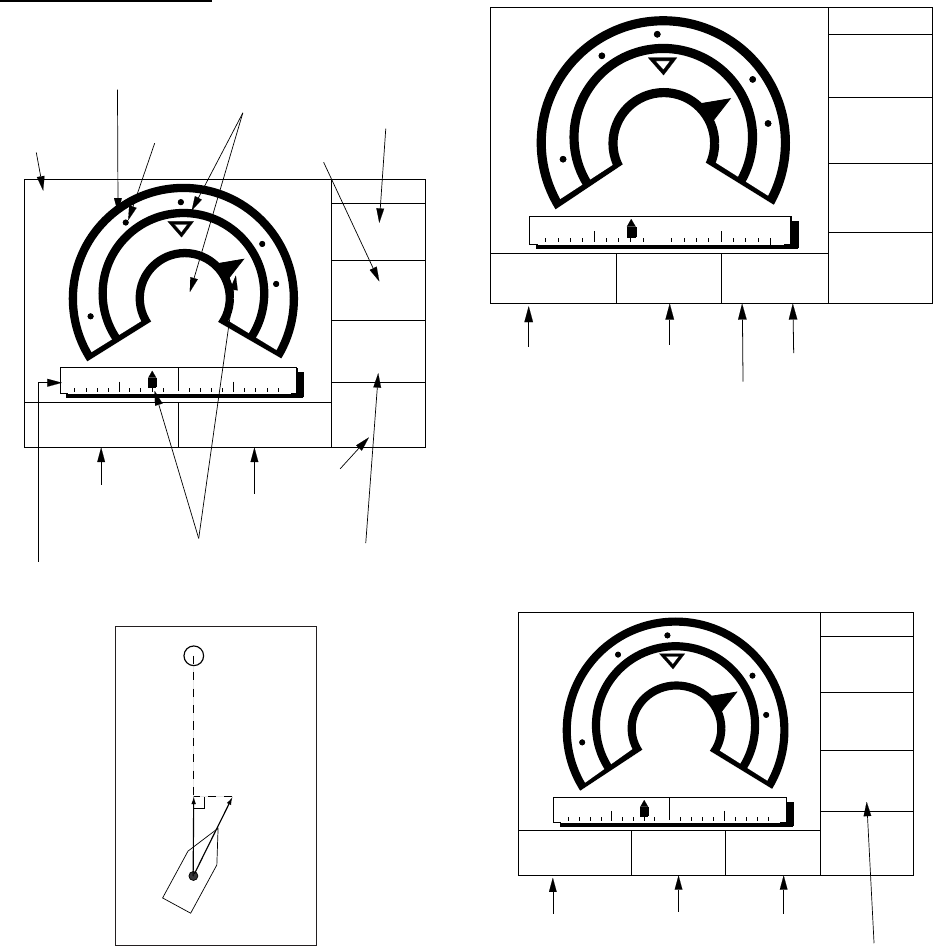
Navigation display
1) No autopilot
E
3D
N
S
12.3
SOG
10.3
123
RNG
789
TRIP
nm
kt
VTD
kt
nm
BRG
23:45'
17H 45M
TO; 012
0.1nm 0.1nm
15
63°
123°
COG
ETA
TTG
Bearing from own
ship to destination
waypoint
Time To Go
(3days17hrs45min)
Cross track
error scale
Cross track
error indication
Cross track
error meter
Destination
waypoint no.
Speed over ground
Bearing
scale
Velocity To
Destination
Range from own
ship to destination
waypoint
Tr ip
distance
Estimated Time of
Arrival (15th23:45)
D3D 100m
SAFE
SOG
VTD
Waypoint
Figure 1-8 Navigation display,
no autopilot
2) Autopilot connected, automatic mode
E
N
S
12.3
SOG
10.3
123
RNG
789
TRIP
nm
kt
VTD
kt
nm
BRG:
Auto
123°
TO;
012
0.1nm 0.1nm
63°
123°
COG:
Auto Pilot
Hdg
Auto mode
P 23°
Str
Heading
Rudder angle
Rudder angle
D3D 100m
SAFE
P: Port
S: Starboard
Figure 1-9 Navigation display, with autopilot
connected, automatic mode
3) Autopilot connected, modes other than
automatic mode
(manual, nav, etc.)
E
N
S
12.3
SOG
10.3
123°
AP CSE
789
TRIP
nm
kt
VTD
kt
BRG:
Man
123°
TO;
- - -
0.1nm 0.1nm
63°
123°
COG:
Auto Pilot
Hdg
P 23°
Str
Autopilot-set
course
Man: Manual mode
Nav: Nav mode
Other:---
Heading
Rudder angle
D3D 100m
SAFE
Figure 1-10 Navigation display, autopilot
connected, modes other than
the automatic mode