



















1-2
2. PRINCIPLE OF MEASUREMENT
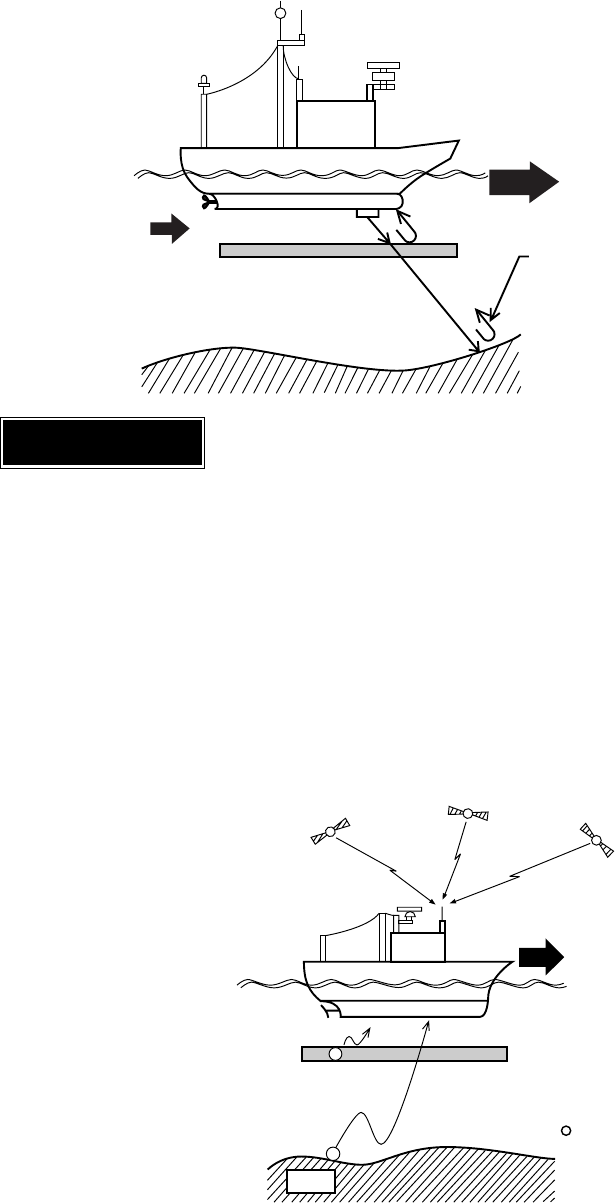
When a moving vessel emits an acoustical pulse into the water at an angle, a portion of emitted
energy is reflected from the seabed and other microscopic objects in the sound path, such as plank-
ton or air bubbles. The frequency of the received signal is shifted from the transmitted frequency in
proportion to relative velocity between the vessel and underwater reflecting objects. This is called
Doppler Effect.
The CI-35/35H calculates and displays movements of ship and currents at specific depths by mea-
suring Doppler shifts obtained from three separate directions.
Planktonic layer
Seabed
Frequency of reflected signal is
shifted in proportion to relative speed
between the vessel and reflecting
objects.
Ship’s Speed
(Here, speed is a vector value including velocity and direction.)
Depending on the base of measurement, ship’s speed is expressed in two ways:
Ground tracking speed: Ship’s speed and course relative to seabed (fixed base)
(Absolute speed)
Water tracking speed: Ship’s speed and course relative to water layer just below the
vessel (floating base)
(Relative speed)
Nav-aided speed: Ship’s speed and course obtained by external navigation
equipment (GPS)
(Absolute speed)
Fixed
GPS satellites
Nav-aided speed
(Pseudo ground tracking speed)
Water tracking speed
Ground tracking speed
Near-surface layer
:Base of measurement