



















x
Tide Calculation in Nav-Aided Mode
In nav-aided mode, the CI-35/35H derives tide information from the following data.
(1) Ship’s speed/course sensed by the external navigator (GPS)
(nav speed = pseudo ground speed)
(2) Ship’s speed/course based on target layer
(water speed)
(3) Bearing of ship’s bow
(Heading by gyro)
Here, nav speed (1) is the ship’s speed vector sensed
by the external navigator, and the moving direc-
tion is expressed with respect to true north.
While the water speed (2) is the ship’s speed vec-
tor measured by CI-35/35H using the Doppler shifts
against the measuring layer, and accordingly its di-
rection is expressed with respect to the ship’s bow.
As the directional reference of these two vectors
are different (north vs ship’s bow), we can not sim-
ply calculate the difference of vectors to obtain the
tide vector in question.
So the direction of water speed vector (2) is con-
verted to true bearing (north reference) by using
the gyro data, and then the tide vector is calculated.
If the gyro data contains some error, the true bear-
ing of the water speed vector changes (rotates) ac-
cordingly. While the bearing of the nav speed vector
does not change with the gyro error. (The relative
angle of these two changes.)
In other words the tide vector, given as a differ-
ence of these two speed vectors, changes in size
(speed) and bearing by the gyro error. (Error in size
and bearing mean the tide vector is unreliable and
useless.)
You may now realize that the gyro data in nav-aided
mode is very important and it has to be accurate
enough for reliable tide data.
To obtain dependable tide/tide differential data, it
is desirable to reduce the gyro error below 1 de-
gree.
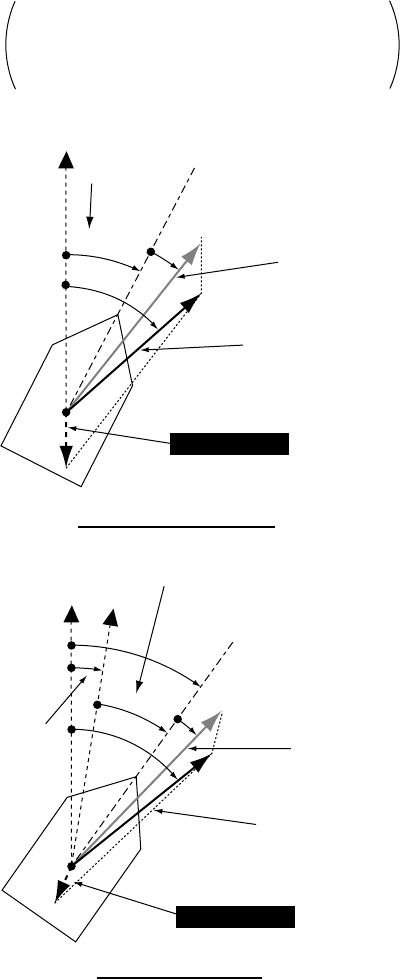
True north
eGyro
reading
Ship’s bow
wWater speed
vector
qNav speed
vector
Tide Vector
=
Without gyro error
True north
Tide Vector
eGyro
reading
Ship’s bow
wWater speed
vector
qNav speed
vector
With gyro error
Gyro
error
Relative angle of water speed vector and
nav speed vector changes with gyro error.
Accordingly, the size (speed) and direction
of tide vector change.
: True bearing of ship’s bow (ref. north)
: Gyro reading
: True bearing of nav speed (ref. north)
: Direction of water speed (ref. bow)
A
θ
H
θ
A
θ
H
θ
N
θ
N
θ
W
θ
A
θ
H
θ
N
θ
W
θ
W
θ
Note: The depth must be at least 40 m in order to calculate tide.