



















ix
WHY IS GYRO DATA IMPORTANT IN NAV-AIDED MODE?
If you consider the difference of tide vector calculations is ground-tracking mode and in nav-aided
mode, you will realize how important the gyro (heading) information is.
Tide Calculation in Ground-Tracking Mode
In ground-tracking mode, the CI-35/35H derives
tide information from the following data.
(1) Ship’s speed/course based on ground
(ground speed)
(2) Ship’s speed/course based on target layer
(water speed)
(3) Bearing of ship’s bow
(Heading by gyro)
Both ground speed (1) and water speed (2) are
sensed by the common transducers mounted on the
hull. Thus, they are the speed vectors with respect
to the ship’s bow. No matter what the true bearing
of ship’s heading be, the relative angle of these two
vectors does not change. The tide vector is simply
given as the difference of these two speed vectors.
The heading data by gyro (3) is used after the tide
vector calculation just to express the vector direc-
tions in true bearings (north referenced).
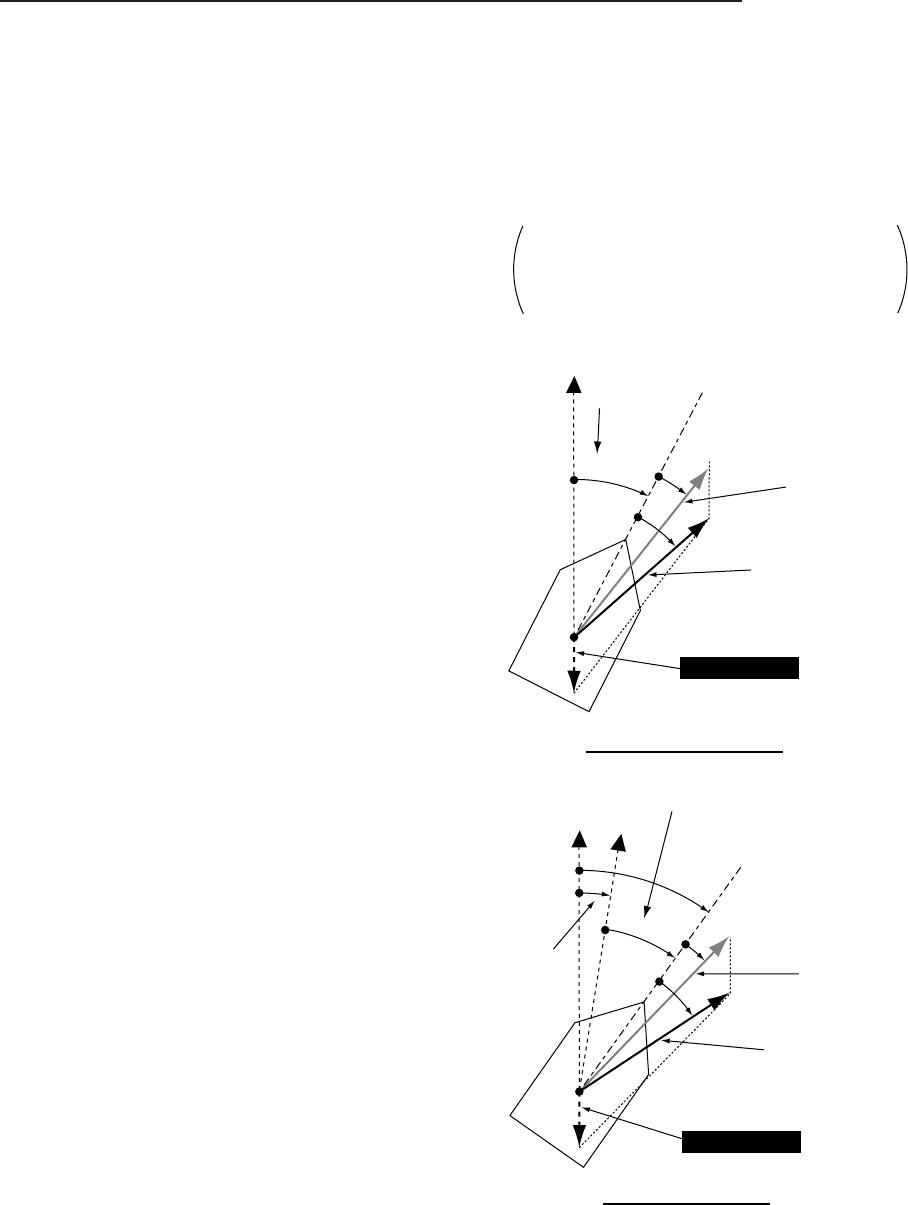
Even if the gyro data contains error, the sizes and
relative angles of vectors do not change. The gyro
error only affects the bearing indication of each vec-
tor.
True north
eGyro
reading
Ship’s bow
wWater speed
vector
qGround speed
vector
Tide Vector
=
Without gyro error
True north
Tide Vector
eGyro
reading
Ship’s bow
wWater speed
vector
qGround speed
vector
With gyro error
Gyro
error
True bearing of each speed vector contains
fixed error. But, their sizes and relative angles
are maintained despite the gyro error.
: True bearing of ship’s bow (ref. north)
: Gyro reading
: Direction of ground speed (ref. bow)
: Direction of water speed (ref. bow)
A
θ
A
θ
H
θ
H
θ
G
θ
G
θ
W
θ
A
θ
H
θ
G
θ
W
θ
W
θ