



















78
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
Similar equations are then used to calculate
velocity using relative velocities instead of pseudo-
ranges. The position, velocity, and time data is
generally computed once a second.
If one of these parameters, such as altitude,
is known, only three satellite pseudo-range
measurements are needed for the receiver to
determine its position and time. In this case, only
three satellites need to be tracked.
GPS accuracy
GPS accuracy has a statistical distribution which is
dependent on two important factors. The expected
accuracy will vary with the error in the range
measurements as well as the geometry or relative
positions of the satellites and the user.
Dilution of precision
The Geometric Dilution of Precision (GDOP)
indicates how much the geometric relationship of
the tracked satellites affects the estimate of the
receiver’s position, velocity, and time.
Four other DOP components indicate how the
geometry specifically affects errors in horizontal
position (HDOP), vertical position (VDOP),
position (PDOP), and time (TDOP).
DOPs are computed based on the spatial
relationships of the lines of sight between the
satellites and the user. The motion of the satellites
relative to each other and the user causes the
DOPs to vary constantly. For the same range
measurement errors, lower DOPs relate to more
accurate estimates.
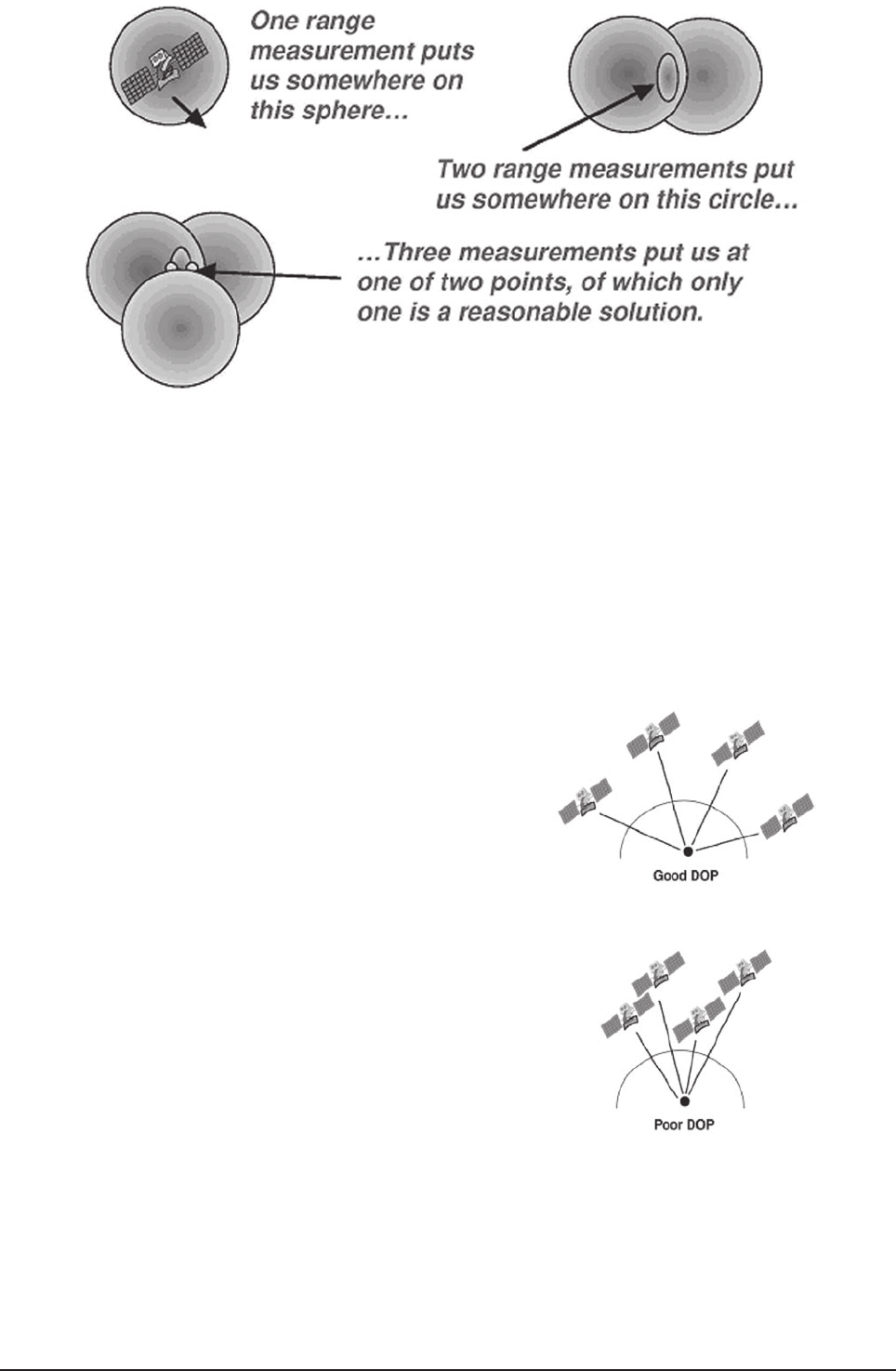
The errors in the range measurements used
to solve for position may be magnified by poor
geometry. The least amount of error results
when the lines of sight have the greatest angular
separation between them (see Figure C-4).
For example, if two lines of sight are necessary to
establish a user position, the least amount of error
is present when the lines cross at right angles.
Figure C-4 Geometric dilution of precision
Range Measurement Error
The error in the range measurement is dependent
on one of two levels of GPS accuracy to which the
user has access. PPS is the most accurate, but is
Figure C-3 Satellite ranging intersections