15
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
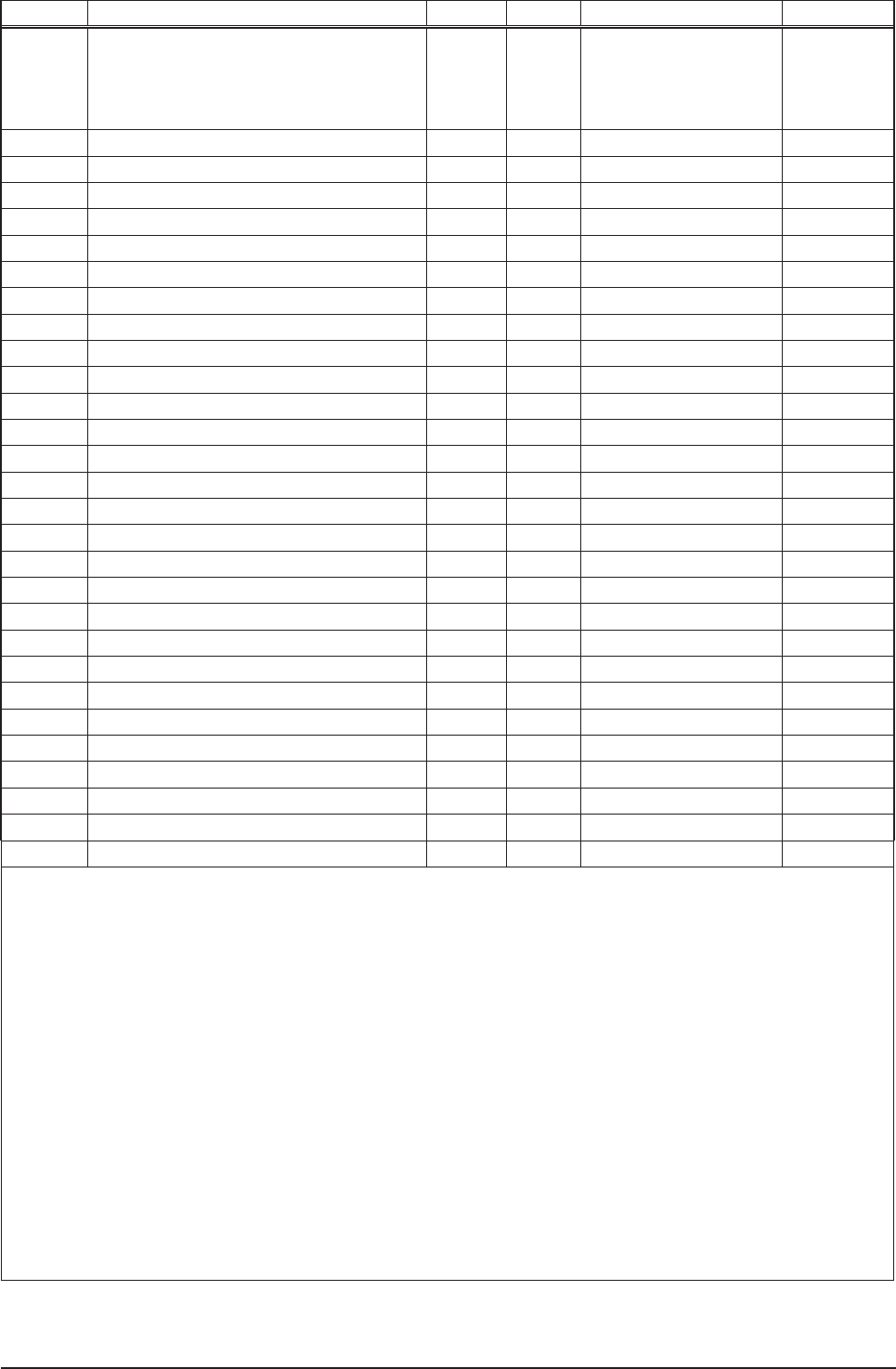
Word No Name Type Units Range Resolution
13
Non-DR link: polar navigation
DR navigation link:
Bit 0 = polar navigation
Bit 15 to 1 = heading uncertainty standard
deviation (Note 12)
Bit
Bit
UI
degrees
1 = true
1 = true
0 to 300
0.01
14 GPS week number UI weeks 0 to 32 767
15-16 GPS seconds from epoch UDI
s 0 to 604 799
17-18 GPS nanoseconds from epoch UDI ns 0 to 999 999 999
19 UTC day UI day 1 to 31
20 UTC month UI month 1 to 12
21 UTC year UI year 1980 to 2079
22 UTC hours UI
h 0 to 23
23 UTC minutes UI min 0 to 59
24 UTC seconds UI
s 0 to 59
25-26 UTC nanoseconds from epoch UDI ns 0 to 999 999 999
27-28 Latitude DI rad ±0 to
�/2 10
-8
29-30 Longitude DI rad ±0 to � 10
-8
31-32 Height DI m ±0 to 50 000 10
-2
33 Geoidal separation 1 m ±0 to 200 10
-2
34-35 Ground speed UDI m/s 0 to 1000 10
-2
36 True course UI rad 0 to 2� 10
-3
37 Magnetic variation 1 rad ±0 to �/4 10
-4
38 Climb rate 1 m/s ±300 10
-2
39 Map datum (Note 13) UI 0 to 188 and 300 to 304
40-41 Expected horizontal position error (Note 14) UDI
m 0 to 320 000 000 10
-2
42-43 Expected vertical position error (Note 14) UDI m 0 to 250 000 10
-2
44-45 Expected time error (Note 14) UDI m 0 to 300 000 000 10
-2
46 Expected horizontal velocity error (Note 14) UI m/s 0 to 10 000 10
-2
47-48 Clock bias (Note 14) DI m ±0 to 9 000 000 10
-2
49-50 Clock bias standard deviation (Note 14) DI m ±0 to 9 000 000 10
-2
51-52 Clock drift (Note 14) DI m/s ±0 to 1000 10
-2
53-54 Clock drift standard deviation (Note 14) DI m/s ±0 to 1000 10
-2
55 Data checksum
Note 1: Set time is an internal 10 millisecond (T10) count since power-on initialisation enabled the processor interrupts. It is not used
to derive GPS time, but only serves to provide a sequence of events knowledge. The set time or T10 count references the receiver’s
internal time at which the message was created for output. The T10 range is approximately 71 weeks.
Note 2: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message output.
Note 3: The satellite measurement sequence number relates the position solution data to a particular set of satellite measurements
found in binary Messages 1002 and 1007 (channel summary message and channel measurement message, respectively).
Note 4: The value of this data item was initially set using the solution validity criteria message (Message 1217).
Note 5: Either no DR messages are being received or data has been detected as inconsistent with GPS.
Note 6: No calibration is available for DR measurements from concurrent GPS or from stored values.
Note 7: No calibration is available for DR measurements from concurrent GPS.
Note 8: It should be noted that bit zero of word 11 does not refer to a solution propagated by the navigation software. This bit is used
to indicate if the solution was propagated by the serial I/O manager to generate a 1 Hz output message when no new navigation
state data was available. This is an error condition potentially caused by a shortage of throughput in one cycle. It is unlikely to occur
and is self correcting. Normal state propagation which occurs within the navigation software with or without measurements available
for processing does not cause this bit to be set.
Note 9: Navigation is based on GPS alone. Current system or GPS/DR with no DR measurements available.
Note 10: DR is running with concurrent calibration by GPS.
Note 11: DR is running with calibration from stored values from prior operating session.
Note 12: An uncertainty value of 0x7FFF indicates unknown heading. A message value 0x000D indicates Polar navigation equals
true and heading uncertainty SD equals 0.06 (hex value 0x000C).
Note 13: Appendix B contains map datum codes from 0 to 188. Codes 300 to 304 are user-defined.
Note 14: The data displayed by this field is not valid until the receiver is in navigation mode.
Table 3-5 (2 of 2) Message 1000 (geodetic position status output)



























































































