



















37
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
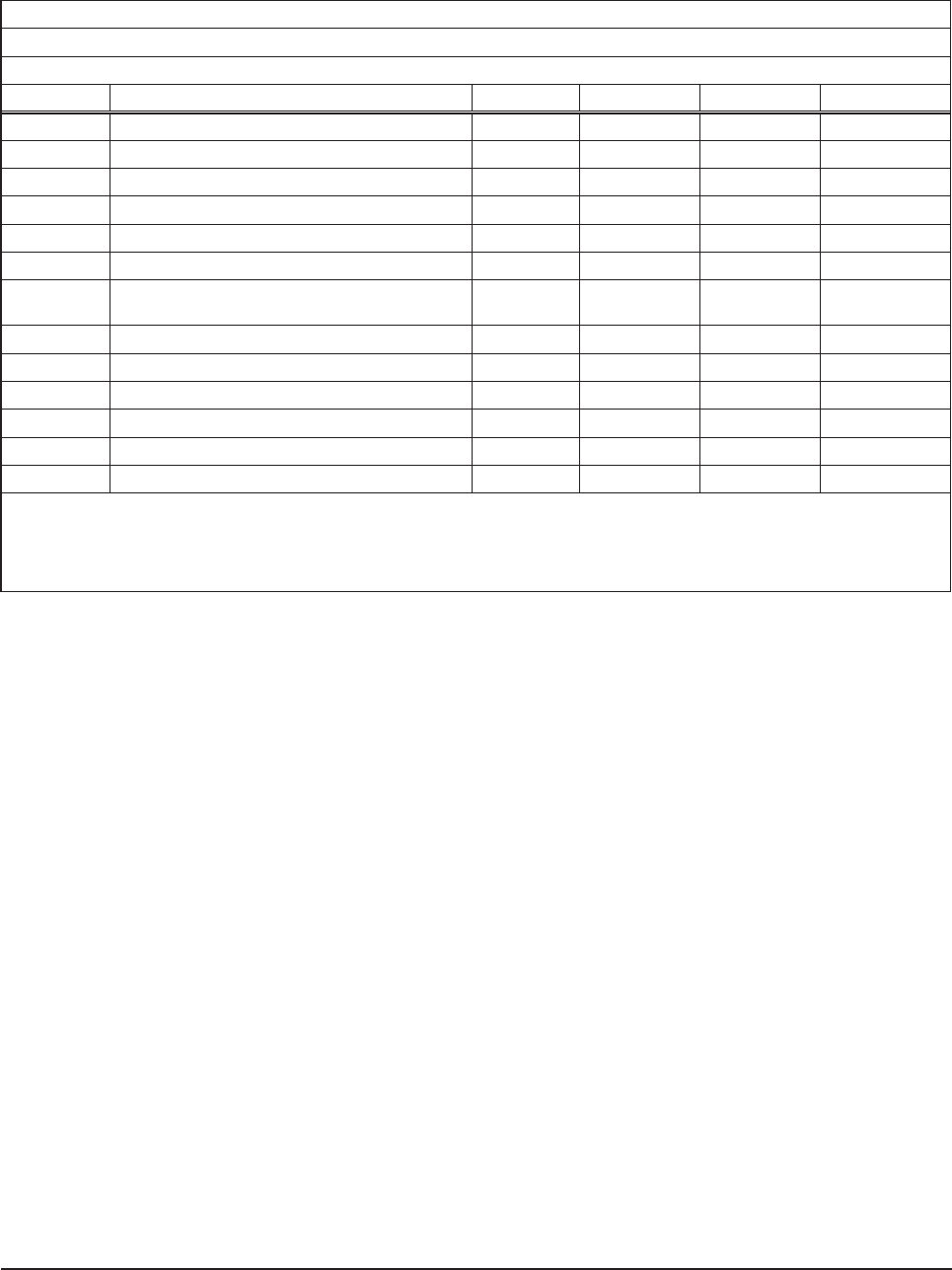
3.5.2.8 Message 1217 (solution validity input)
The receiver will always output the best position
solution it can attain, depending on the number
and quality of available measurements. The
Solution Validity Input Message allows the user to
define the criteria for setting the position validity
Message ID: 1217
Rate: as required (maximum rate is 1 Hz)
Message length: 13 words
Word No. Name Type Units Range Resolution
1-4 Message header
5 Header checksum
6 Sequence number (Note 1) I 0 to 32 767
7.0 Altitude not used Bit 1 = required
7.1 Differential GPS Bit 1 = required
7.2 DR measurements required (Note 2) Bit 1 = required
7.3
Concurrent GPS calibration of DR required
(Note 3)
Bit 1 = required
7.4 GPS only solution required (Note 4) Bit 1 = required
7.5-7.15 Reserved
8 Minimum number of satellites used UI 0 to 12
9-10 Maximum expected horizontal position error UDI
m 0 to 1000 10
-2
11-12 Maximum expected vertical position error UDI m 0 to 1000 10
-2
13 Data checksum
Note 1: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message input.
Note 2: Must operate with DR. stand-alone GPS not acceptable.
Note 3: DR must be calibrated by concurrent GPS. Stored calibration from past sessions not acceptable.
Note 4: DR must NOT be used, even if available.
Table 3-30 Message 1217 (solution validity input)
status specified in the position output messages.
The status will be set to ‘invalid’ if any of the
specified requirements are not met. Storage of this
message’s parameters requires EEPROM. The
contents of the ‘solution validity input’ message are
described in Table 3-30.