



















20
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
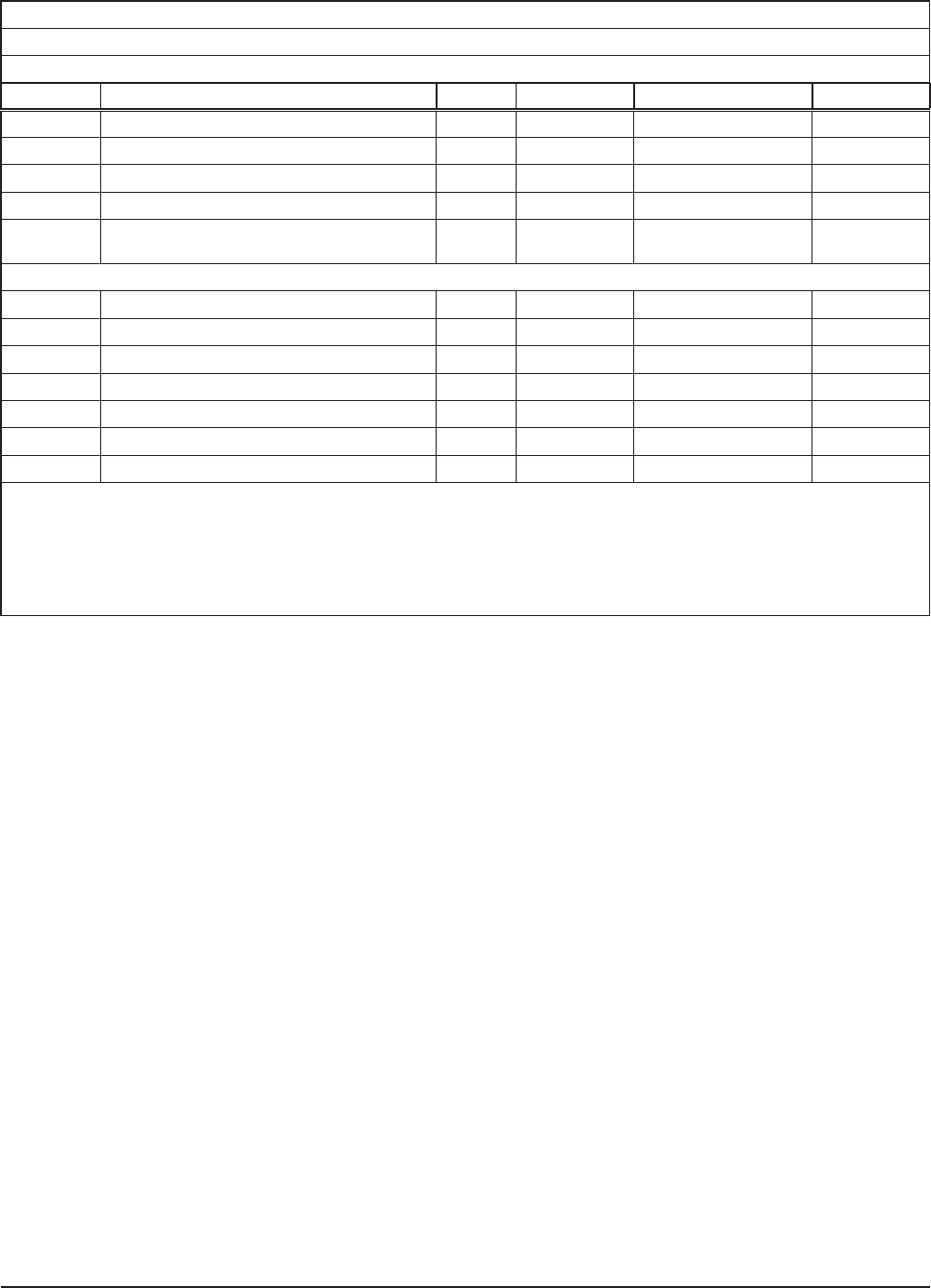
Message ID: 1009
Rate: variable
Message length: 22 words
Word No. Name Type Units Range Resolution
1-4 Message header
5 Header checksum
6-7 Set time (Note 1) UDI 10 ms ticks 0 to 4 294 967 295
8 Sequence number (Note 2) I 0 to 32 767
9
Satellite measurement sequence number
(Note 3)
I 0 to 32 767
ECEF navigation solution
10-11 ECEF Position - X (Note 4) DI m ±0 to 9 000 000 10
-2
12-13 ECEF Position - Y (Note 4) DI m ±0 to 9 000 000 10
-2
14-15 ECEF Position - Z (Note 4) DI m ±0 to 9 000 000 10
-2
16-17 ECEF Velocity - X (Note 4) DI m/s ±0 to 1000 10
-2
18-19 ECEF Velocity - Y (Note 4) DI m/s ±0 to 1000 10
-2
20-21 ECEF Velocity - Z (Note 4) DI m/s ±0 to 1000 10
-2
22 Data checksum UI
Note 1: Set time is an internal 10 millisecond (T10) count since power-on initialisation enabled the processor interrupts. The set time
indicated is at the time the message is submitted to the output queue.
Note 2: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message output.
Note 3: The satellite measurement sequence number relates the position solution data to a particular set of satellite measurements
found in binary Messages 1002 and 1007 (channel summary message and channel measurement message, respectively).
Note 4: The data displayed by this field is not valid until the receiver is in navigation mode.
Table 3-10 Message 1009 (ECEF position output)
3.5.1.6 Message 1009 (reduced ECEF position
status output)
This message provides measurement and
associated data for each of the receiver’s
12 channels. The contents of the ‘channel
measurement’ message are described in
Table 3-10.