



















RVS-DX, Digital Soft Starter Instruction Manual—4/01/04
5-5
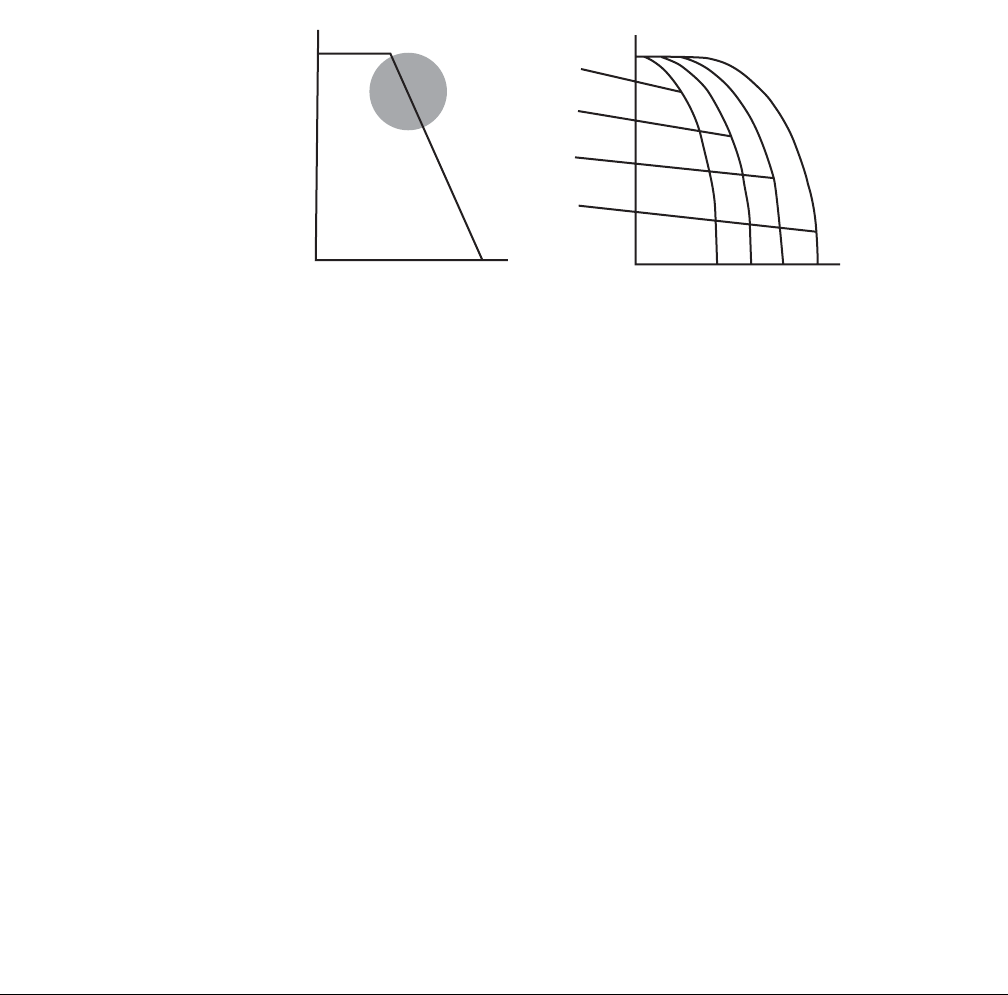
Stop Curves
For many applications, the load torque decreases in a square relation to the speed. In these
applications, reducing the voltage will reduce the torque and the motor will smoothly decelerate to a
stop. With these applications the standard stop curve (0) will be adequate. The stop curve (0) reduces
the voltage linearly from nominal to zero.
In some other applications (namely pumps), a considerable amount of the torque is constant and does
not decrease with speed. In these applications the motor torque could fall below load torque during
stopping, causing the motor to stall. By using stop curves (1, 2 or 3) the motor will smoothly
decrease to zero speed and prevent the stall condition.
The stop curves are shown in the graph below:
NOTE: Always begin with Stop Curve 0. If your motor stalls quickly, instead of slowly decreasing
its speed then try selecting stop curve 1, then 2 and then 3 if necessary.
Deceleration Time (Soft Stop)
The deceleration time is used for controlled deceleration of high friction loads. When the soft stop is
initiated the RVS-DX’s output voltage is gradually ramped down. The deceleration time is
programmable from 0 to 30 seconds.
Final Torque
The final torque setting determines the torque towards the end of the soft stop. If the motor stalls
while current is still flowing and the speed has softly been reduced to zero, increase the final torque
setting to prevent unnecessary motor heating. The final torque can be set from 0 to 10 (maximum).
V
oltage
Deceleration
0
1
2
3