



















4-6
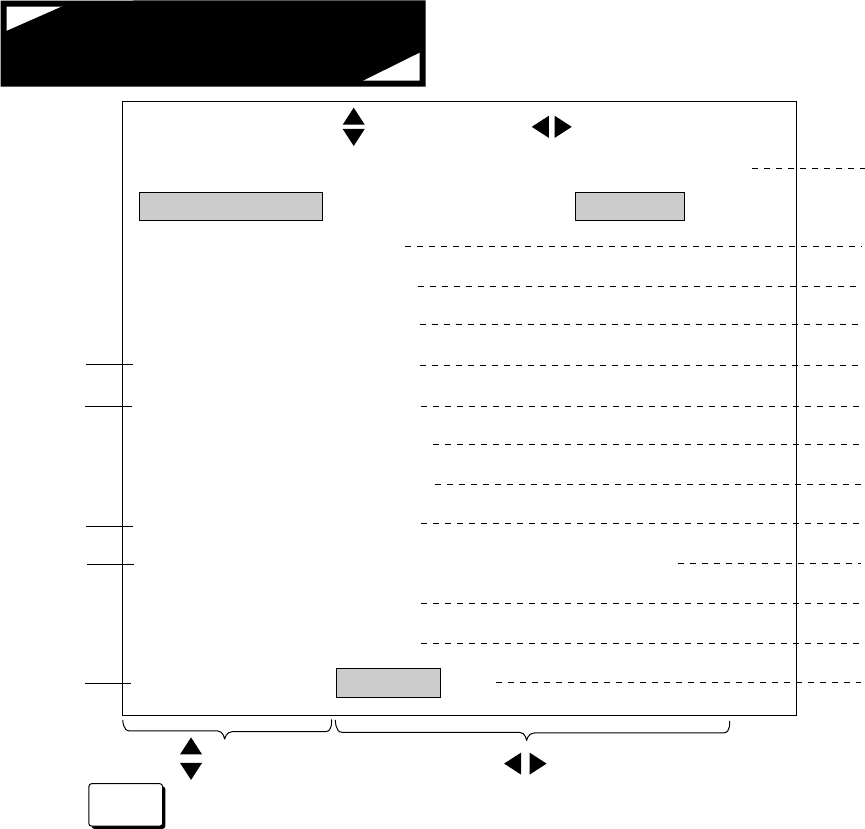
* MENU 3 *
KNOB ITEM
Jan/15/1997
KNOB SETUP
END : MENU KEY
MENU MODE
: MENU1
MENU2
MENU3
MENU4
SHIP SPD AVR
: 15sec
DRAFT
: 0.0 m
WT SPD DEPTH
: 2.0 m
HEEL ANGLE
: 0.0 °
TRIM ANGLE
GT SPD CALIB
: 0.0 °
: 0.0 %
WT SPD CALIB
: 0.0 %
BEARNG CALIB
: 0.0 °
COURSE CALIB
: 0.0 ° (GT 0. 0 ° ) (NAV 0. 0 ° )
EXT KP1 DIST
: 0.0 m
EXT KP2 DIST
BTM TIDE TRK
: 0.0 m
: OFF ON
Knob
Knob
!0Offset angle to align course by CI-35/35H and course by external naviator [GPS] (-12.8 to
+12.7°)
(GTx.x and NAVx.x are offset angles calculated by “CRS CALIB EXEC” operation in MENU 4.)
9Bearing offset angle of transducer (-12.8 to +12.7°)
“-”: transducer’s fore-aft axis deviated to port
“+”: transducer’s fore-aft axis deviated to starboard
8Ship speed offset in water tracking mode
7Ship speed offset in ground tracking mode
6Fore-aft inclination angle (-12.8 to +12.7°)
“-”: aft-high “+”: fore-high
5Lateral (port-starboard) inclination angle (-12.8 to +12.7°)
“-”: starboard-high “+”: port-high
4Reference depth to measure ship’s speed in water tracking mode......(2.0 to 25.6 m)
3Draft level; i.e., depth of transducer from sea surface......(0.0 to 25.6m)
2Averaging time for ship speed/course display......(15/30/60/90 sec)
1Press key to store (validate) the settings and to close the menu window.
MENU 3
(NOTE 1)
(Note 2)
(Note 4)
(Note 6)
1
2
3
4
5
8
9
!0
!3
(Note 3)
(Note 5)
6
7
!1
!2
!1Distance between transducers of CI-35/35H and other sounding device which is connected to
the CI-35/35H as interfering source 1. (KP1)
!2Distance between transducers of CI-35/35H and other sounding device which is connected as
interfering source 2. (KP2)
!3Used to select depth setting of layer 3.
“OFF”: Manual setting
“ON”: Automatic tracking on near-bottom tide
MENU