



















3-4
FUNDAMENTAL DATA SECTION
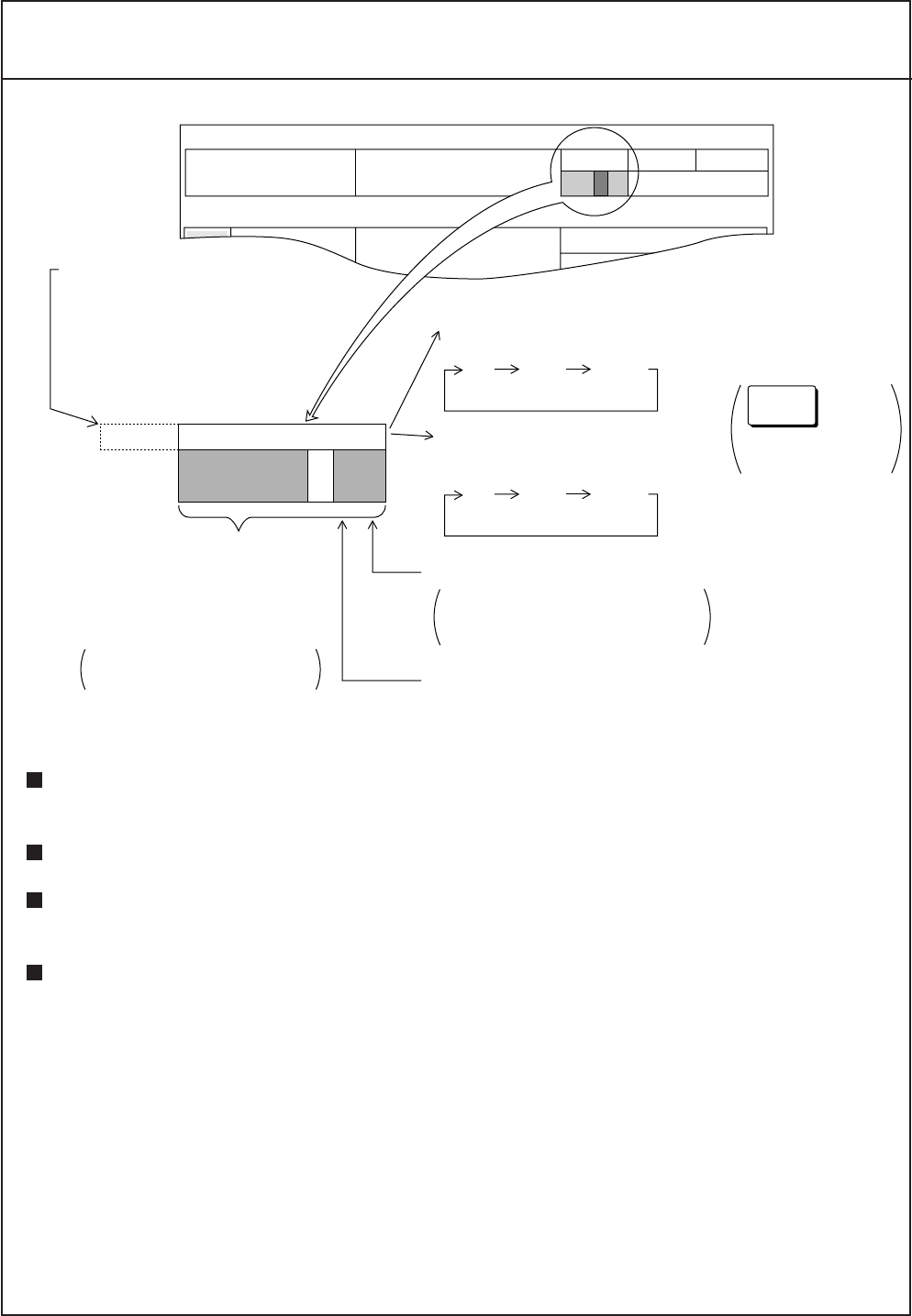
TRACKING MODE Display
Ground Tracking Mode : Shows absolute ship and tide movements based on ground.
(Bottom echo required.)
Water Tracking Mode : Shows movements of ship and tide relative to near-surface water.
Nav-aided Mode : Shows ship’s movement measured by the external navigation equip-
ment, and the tide movements based on the nav speed data.
Auto Tracking Mode : Uses ground tracking mode when bottom echo is available. Switches
to water tracking mode (or nav-aided mode) when bottom echo is
lost. Bottom echo is continuously searched for, and if re-acquired
the ground tracking mode is restored.
(*1) Manual bottom acquisition is possible to disable unexpected bottom search when bottom
echo is interrupted for a short period by air bubbles, or to avoid tracking on bottom fish.
(See page 2-2 to enable manual ground tracking.)
(*2) For efficient and reliable bottom search in the auto tracking mode, depth data from an echo
sounder can be used as a reference. In this case, “EXT” appears as a tracking mode identi-
fier. (See page 4-4 to enable external depth input.)
(*1)
(*2)
SPEED
8.0
kt
W
273
¡
COURSE MODE COMPASS
GT
270.0
17 : 41 : 00
NE
45
¡
DEP
TIDE
DIRECTION
TRIP
0.00 NM
1
G TGPS
¡If NENU2- WT SPEED is
set to T/D ;
GT NAV AUTO
¡If NENU2- WT SPEED is
set to NAV-TIDE ;
GT NAV AUTO
Color represents tracking mode
Green : Ground tracking mode
Blue : Water tracking mode
Blue : Nav-aided mode
Blank section: Reference echo lost
Tracking mode and echo
availability for last 2 minutes.
Flows leftward every 3
seconds.
Right most segment shows
latest status.
TRACK
MODE
key
changes tracking
mode cyclically.
Displays nav data source
when NAV mode is selected.
¡GPS: GPS navigator
¡LC : Loran-C navigator
¡DC : Decca navigator
¡DR : Dead-reckoning
¡LA : Loran-A