



















6 OPERATIONAL EXAMPLES OF APRS
42 CONTENTS TH-D72A/E
Characters can be entered using the encoder or 10-key numeric keypad as you would when texting
from a cell phone.
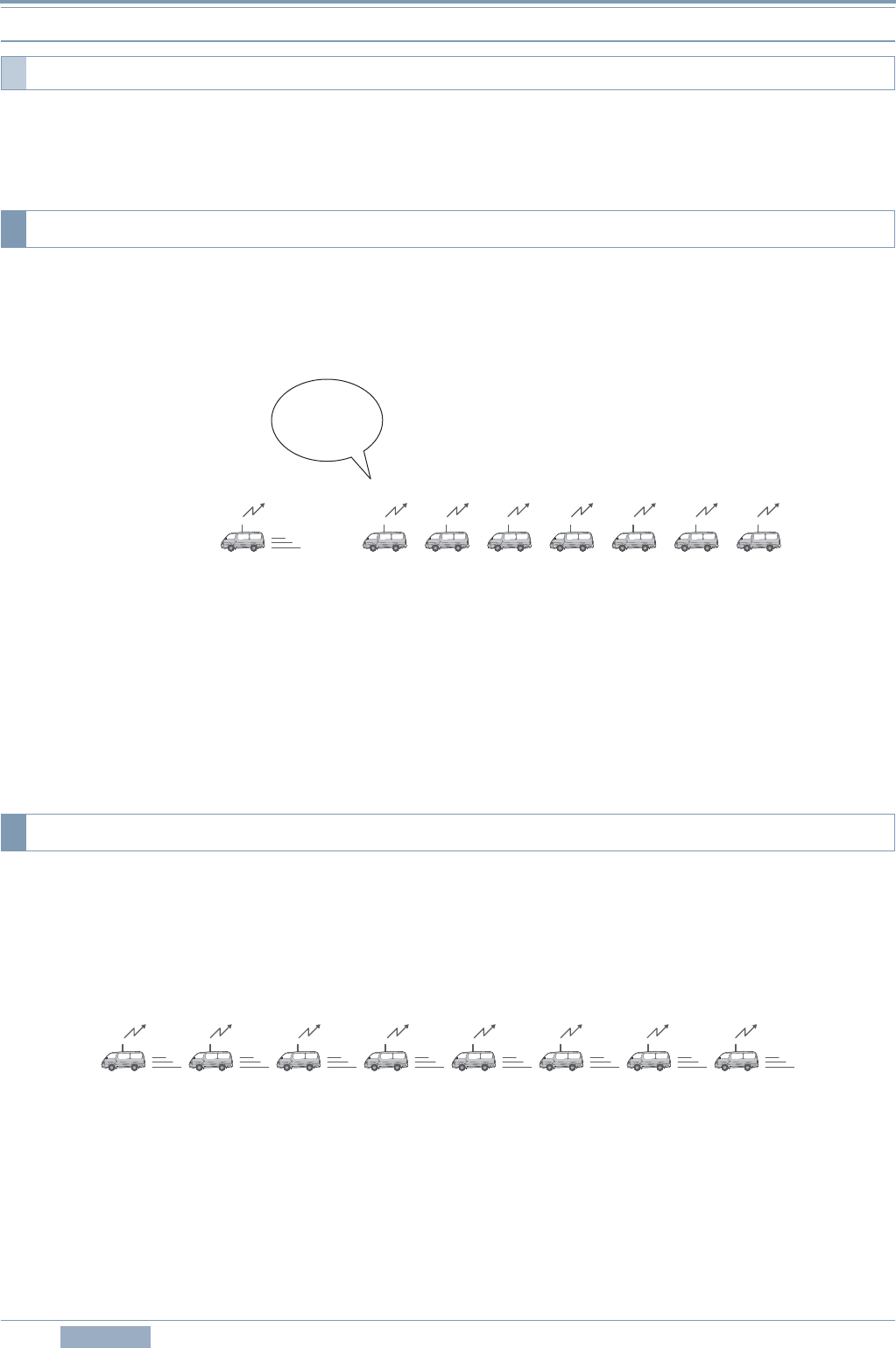
If the position beacon for a mobile station is configured to be transmitted at a fixed time interval, it
would be inefficient use of air-time to continue transmitting at this fixed interval when traffic is slow-
moving. The beacon transmission interval gradually increases by using a decay algorithm, thus
cleverly reducing air-time used by the station.
Figure 6-1 Decay Algorithm
Decay Algorithm steps the transmission interval of the beacon down from 1 (if the automatic
transmission interval is set to 1 minute) to 2 to 4 to 8 to 16 to 32 minutes when the mobile station is not
moving. On the TH-D72A/E, when the interval for automatic transmission is greater than that of Decay
Algorithm, the automatic transmission interval is used. The speed at which Decay Algorithm decides
that the car is parked can be set using the “Stopped” dropdown list in the Basic tab of the APRS
window of the MCP-4A programming software. If the mobile station’s speed is less than this setting,
then Decay Algorithm will start. The speed setting can be changed only in the MCP-4A program.
This function automatically changes the transmit packet path (relay route) as the automatic
transmission interval elapses while traveling. The function substantially reduces load on the entire
network by maintaining the packet update frequency at the automatic transmission interval for nearby
stations that do not require relaying, while thinning the number of relay hops for distant stations that
do not require frequent updates.
Figure 6-2 Example of path switchover operation of Proportional Pathing
(when the packet path is set to WIDE1-1, WIDE2-2)
The speed at which Proportional Pathing decides that the car is moving can be set using the Moving
dropdown list in the Basic tab of the APRS window of the MCP-4A programming software. If the
mobile station’s speed exceeds this setting, then Proportional Pathing will start. The speed setting
can be changed only in the MCP-4A program.
6.1.1.2 Entering Characters
6.1.2 Decay Algorithm Function
6.1.3 Proportional Pathing Function
Traffic Jam!
Transmits the
position beacon
2 minutes 4 minutes 8 minutes
16 minutes
32 minutes 32 minutes
Initial interval:
1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
DIRECT
(No hop)
DIRECT
(No hop)
DIRECT
(No hop)
DIRECT
(No hop)
WIDE1-1
(1 hop)
WIDE1-1
(1 hop)
WIDE1-1,WIDE2-1
(2 hops)
WIDE1-1,WIDE2-2
(3 hops)