



















Bluetooth QuickStart Kit Version 1.0 - User’s Guide Page 11
Copyright 2004-2005 © Embedded Artists AB
3.3 Remote Control
Remote control is almost the same as remote access. The only difference is the direction of
the information. In remote access the information mainly flows from the remote system to
(typically) a central place. In remote control the information direction is the opposite; from
the central place to the remote system. A number of (typical) example applications are:
• Motor control, which can for example be a softstarter, power control (on/off),
adding remote I/O capabilities, and simple PLC functionality.
• Pumps, which is basically a motor system that must be controlled.
• Conveyors, which is also a motor system with many parameters to set.
• Ventilation systems, which can be advanced control systems with many parameters
to set and control.
• Device configuration, which is the general case of controlling a remote system.
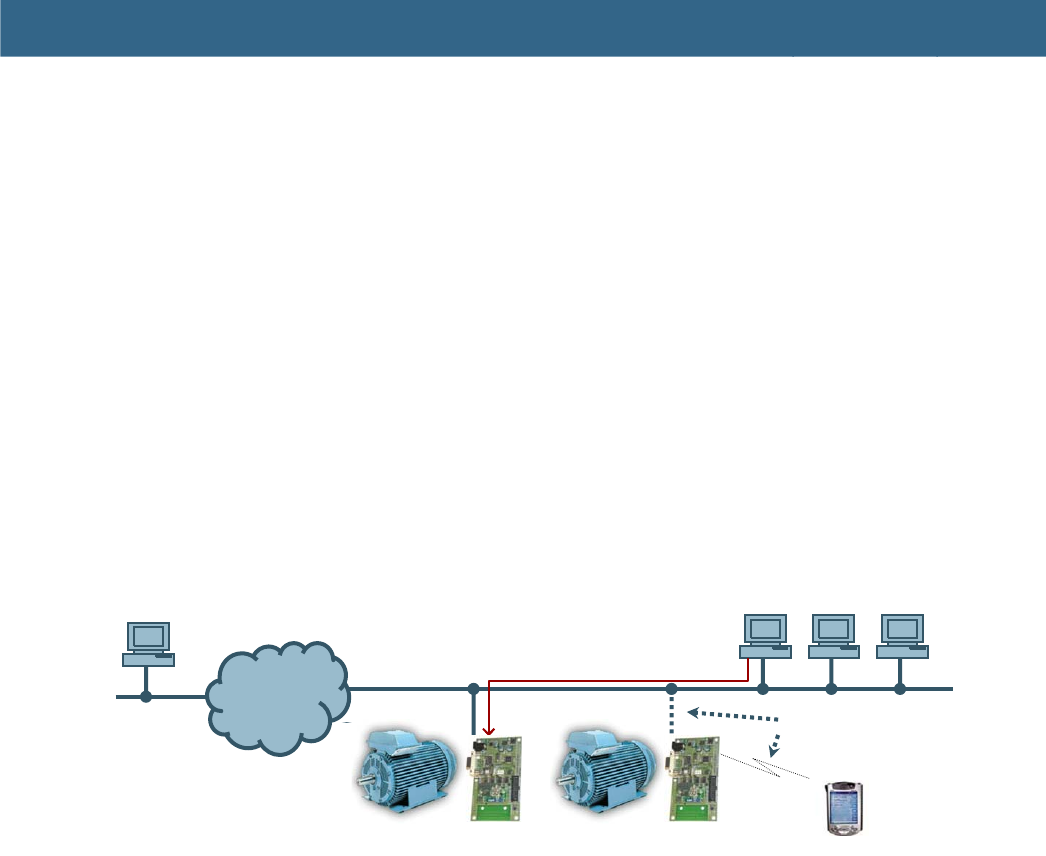
Figure 5 below illustrates remote control of a motor, either via direct cabling or direct
Bluetooth access via a PDA or laptop.
Operator Stations
Wireless
PDA
Internet
Start Motor
Bluetooth or
direct access
Figure 5 – Remote Control Use-Case
There are many benefits when creating remote control systems:
• Of course, the ability to control remote control systems at remote locations
• Wireless control, sometimes as simple as serial cable replacement, but also more
advanced forms of communication.
• The possibility to control hazardous applications, which can for example be
dangerous to be physically close to the system (i.e., rotating or high-voltage).
3.4 Remote Diagnostics
Remote diagnostics is an important application of remote access. An example application is
motor diagnostics that will serve as a reference application in this description. Examples of
analyses are:
• Bearing vibration analysis
• Voltage and current measurement
• Temperature measurement
• Counting number of start and stops
The information can either be locally analyzed or sent to a central location for further
processing. Decisions, like immediately stopping the motor, can be taken locally if the