



















Document Title: 3
User’s Manual for the GPS Orion-S/-HD Receiver
Document No. Issue 1.0
GTN-MAN-0110 June 22, 2003
DLR/GSOCNo part of this document shall be reproduced in any form or disclosed to third parties without prior authorization.
1. Introduction
1.1 GPS Orion Receiver
The GPS Orion receiver represents a prototype design of a terrestrial GPS receiver for 12
channel single frequency tracking built around the Mitel (now Zarlink) GP2000 chipset ([3],
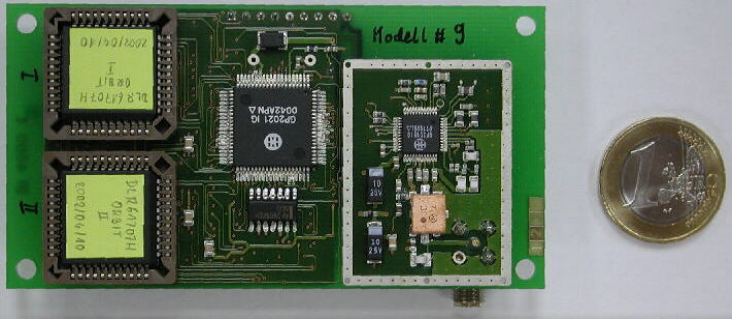
[4]). The receiver main board comprises a GP2015 frontend and DW9255 saw filter, a
GP2021 correlator as well as an ARM60B 32-bit microprocessor. It can be supplemented by
an optional interface board featuring a switching regulator, serial line drivers (RS 232) and a
backup battery.
Fig. 1.1 GPS Orion main board
A basic software for the GPS Orion receiver has earlier been made available by Mitel Semi-
conductor as part of the GPS Architect Development Kit. It is restricted to purely terrestrial
applications and has received numerous extensions and modifications to provide accurate
navigation under the rapidly varying signal conditions encountered in typical space missions.
Key upgrades include enhanced tracking loops, a synchronization of measurements to inte-
ger GPS seconds, the provision of precise carrier phase measurements, a revised navigation
algorithm, as well as a software based aiding of the signal acquisition using reference trajec-
tory data. In addition to the above software changes, the original hardware design has been
amended by a supplementary pin for output of the pulse-per-second signal.
1.2 Functional Overview
DLR’s family of GPS Orion receivers comprises various firmware versions for space and high
dynamics applications. Available software configurations are:
• Orion-S for low Earth satellites and formation flying
• Orion-HD for high dynamics platform like sounding rockets and reentry vehicles
Features common to all receiver models are summarized below.
• 12 fully independent tracking channels
• 2-bit sampling
• 3
rd
order PLL with FLL assist
• Low noise code, carrier and Doppler measurements
• Acquisition aiding using reference trajectory information
• Navigation update rate of up to 2 Hz
• Configurable ASCII output messages in WinMon and NMEA format
• Pulse-per-second signal
• Low power consumption (2 W at 5 Volts)