



















40 Electrical system
9-5
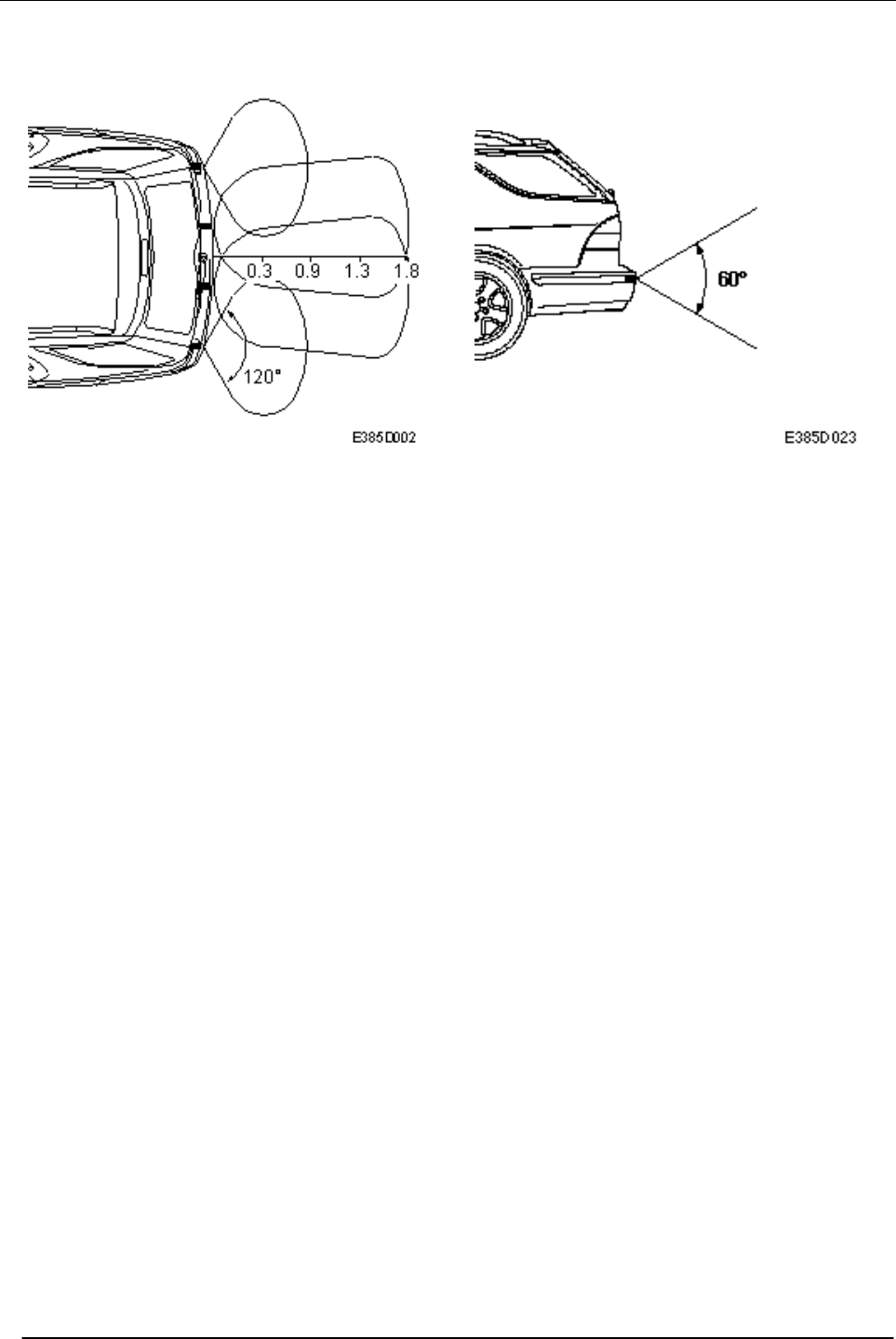
Distance measurement and indication
The control module receives information from
the DICE when reverse gear is selected. The
control module accordingly activates the
distance sensors. The sensors emit and receive
ultrasound signals, sent in a preset pattern, see
Distance sensors.
The control module processes continuous data
input from the sensors in order to send the
correct signal to the SID, and, in turn, to the
driver.
The driver receives information from the SID
regarding the closest object behind the vehicle
in the form of pulses of sound of varying
frequencies. The first indication is given when
there is an object 1.8m / 5.9ft behind the vehicle.
The frequency of the signal is then 2 pulses per
second.
The frequency of the signal increases the closer
to the object the car comes. The signal changes
as follows:
• 1.8m (71in) - 1.3m (51in): 2 pulses/second
• 1.3m (51in) - 0.9m (35in): 3 pulses/second
• 0.9m (35in) - 0.3m (12in): from 5 to 12
pulses/second in close steps
• 0.3m (12in) or closer: continuous tone
If the driver reverses at a speed greater than 1.8
m/s (6.5 km/h or 4 mph), the SPA is of no
benefit, since the indication of distance is limited
to 1.8m / 5.9ft behind the car. The driver has
therefore only 1 second to react and bring the
car to a halt. In addition, the braking distance
must be taken into account. For the SPA to be of
benefit, moderate speeds must be maintained.
If the distance sensors are covered by ice, snow
or dirt, their function will be impaired. In such
cases, the distance sensors should be wiped
clean.
When reversing on a surface that is highly
reflective to ultrasound, the system can indicate
the distance to the ground instead of the closest
object behind the car. This can occur, for
example, on unpaved roads or other uneven
surfaces. Testing of the function of the SPA
must be carried out on an even surface with no
objects placed on the ground.
Objects alongside the car
The SPA also takes objects beside the car into
consideration, such as when reversing alongside
a garage wall. In cases where the outer distance
sensors detect an object that is not detected by
the center sensors, the object is indicated as an
object alongside the car. The threshold for
detection of objects beside the car is approx. 40
cm (16 in).
If the object alongside the car remains at a
constant distance for longer than 3 seconds,
side indication is halted, and only objects directly
behind the car are indicated. If the object
alongside the car subsequently comes 5 cm (2
in) closer to the car, the control module will
again inform the driver of the object via the SID.