



















MX80L Series Product Manual Chapter 4 - Performance
Parker Hannifin Corporation
35
Thermal Effects on Accuracy
The MX80L uses a moving magnet linear servo motor. The magnet rails and the encoder tape are
mounted to the carriage. The motor coils are mounted in the base and unless the table is mounted
to an insulated surface, the heat generated in the coils should radiate out the base maintaining a
low thermal delta between base and carriage. All specifications for the MX80L are taken at 20 C.
Variation from this temperature will cause additional positional errors. If the carriage of the MX80L
varies from this temperature the encoder scale will expand or contract, thus changing its measuring
length and thus encoder resolution.
The factor by which this thermal effect occurs is 0.000022mm/mm/° C. Although this sounds like a
very small number it can make significant accuracy and repeatability effects on your applications,
especially on longer travel applications. To understand this better let’s look at an example:
Example
: A standard grade MX80L with 150mm travel is being used. The accuracy over the entire
travel is 25 microns @ 20° C. If the carriage temperature increases by 5 C an additional error of 17
microns will be added over the total travel (0.000022mm/mm/° C)*150mm*5 C. However, this
additional error can be compensated for since the error is linear.
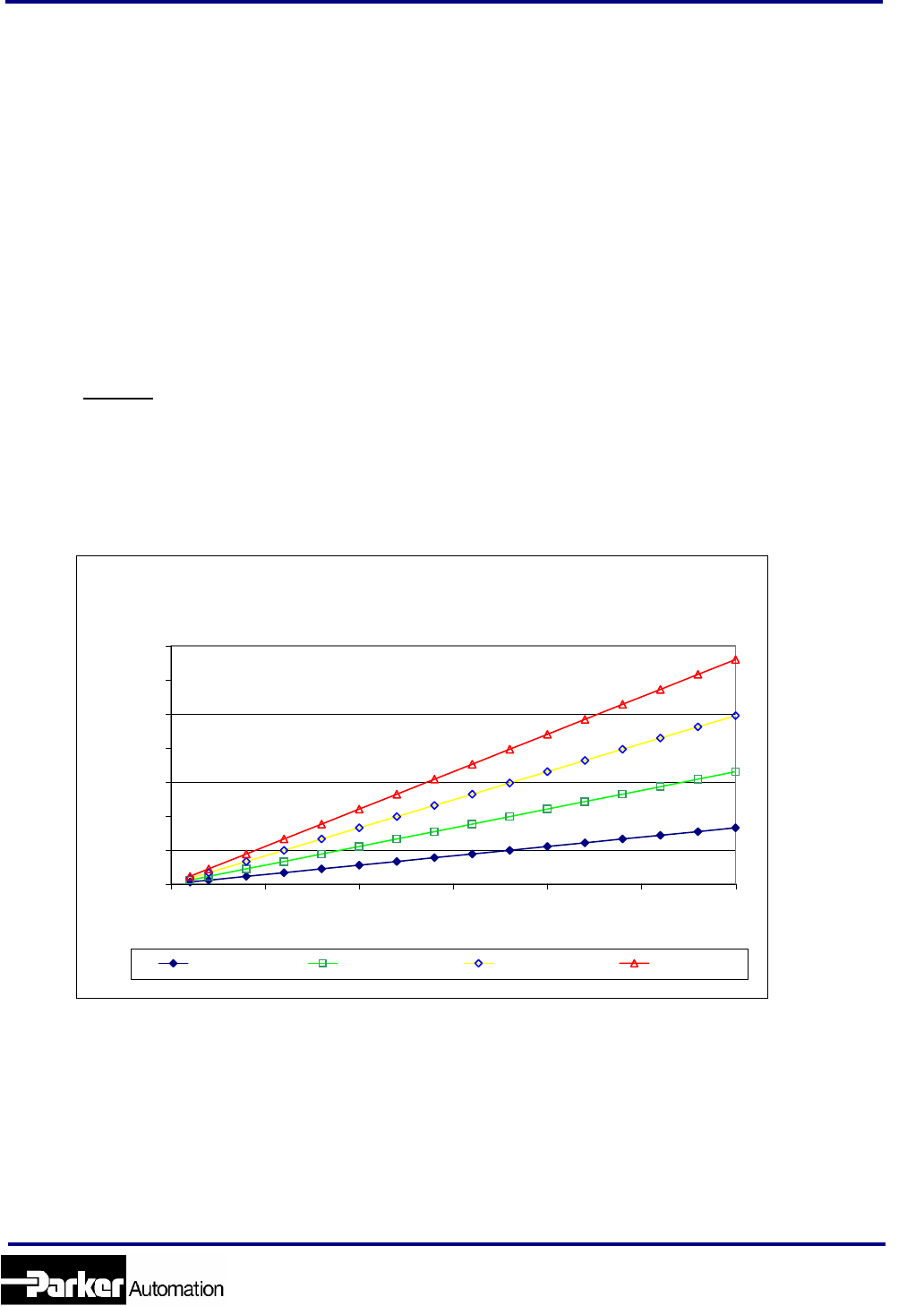
The accuracy of the MX80L is plotted with respect to carriage temperature in the graph below for
the 25 mm, 50 mm, 100 mm and 150 mm travel lengths.
Thermal Effects on Repeatability
Repeatability will not be affected as long as the temperature remains constant. However the
repeatability will be affected as the temperature changes from one level to another. This is most
commonly experienced when starting an application cold. Then as the application runs the MX80L
comes to its operational temperature. The positions defined when the unit was “cold” will now be
offset by the thermal expansion of the unit. To compensate for this offset, all positions should be
defined after the system has been exercised and brought to operational temperature.
Temperature Effect on Accuracy
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0 25 50 75 100 125 150
Travel (mm)
Error (mm)
5 degrees C 10 degrees C 15 degrees C 20 degrees C
Daedal Division
Irwin
,
Penns
y
lvania