



















2. MENU OPERATION
2-11
PWR REDUCTION
Reduces the power output on high and low frequencies. “<P/R>” appears at the
bottom of the screen when turned on. When switching from OFF to ON, it takes
several seconds to reduce power.
BOTTOM SEARCH
On the dual-frequency display, choose transducer which is to measure depth.
The choices are AUTO, low frequency and high frequency. “AUTO” gives priority
to high frequency transducer having greatest accuracy.
BOTTOM LEVEL
When the bottom depth readout is unstable, use this feature to stabilize it. The
setting range is –40 to 0.
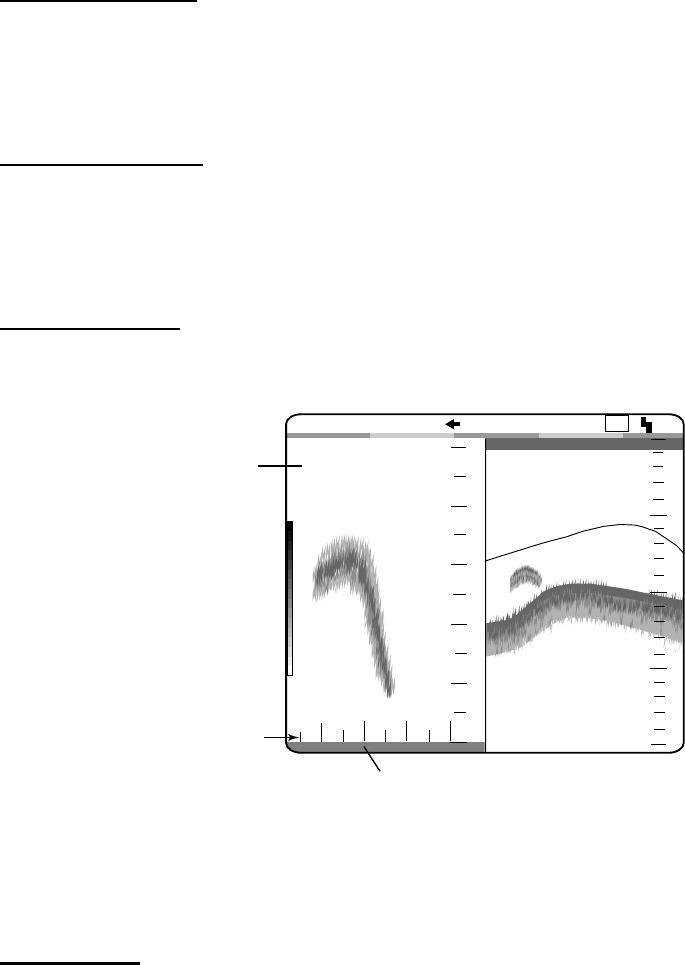
Bottom-lock
display
Set the bottom
search so these
vertical lines disappear.
Bottom
0
40
10
20
30
2
1
3
4
5
0
21.7
LF
1/1
0
m
0.0
How to adjust bottom level
If this setting value is too small, fish echoes may be regarded as bottom, which
causes unstable depth readout.
AUTO MODE
Turns on/off the auto mode.
OFF: Turns off the auto mode. Gain, range and clutter may be adjusted
manually.
CRUISING: Suppresses weak echoes to emphasize bottom echoes clearly. Use
this setting when going to a fishing ground.
FISHING: Displays weak echoes clearly. Use this setting for fishing.
In the auto mode, gain, display range and clutter are automatically adjusted.
Gain is automatically adjusted so the bottom echo is painted in reddish brown. (If
the gain appears to be too strong, it can be offset on the TX/RX menu with
“GAIN ADJ.”) Display range is automatically adjusted to show the bottom echo
on the lower 1/2 of the screen. Clutter is automatically adjusted to suppress
weak echoes such as sediment in the water and plankton.