



















14
LA000507G © 2006 Navman New Zealand. All rights reserved. Proprietary information and specications subject to change without notice.
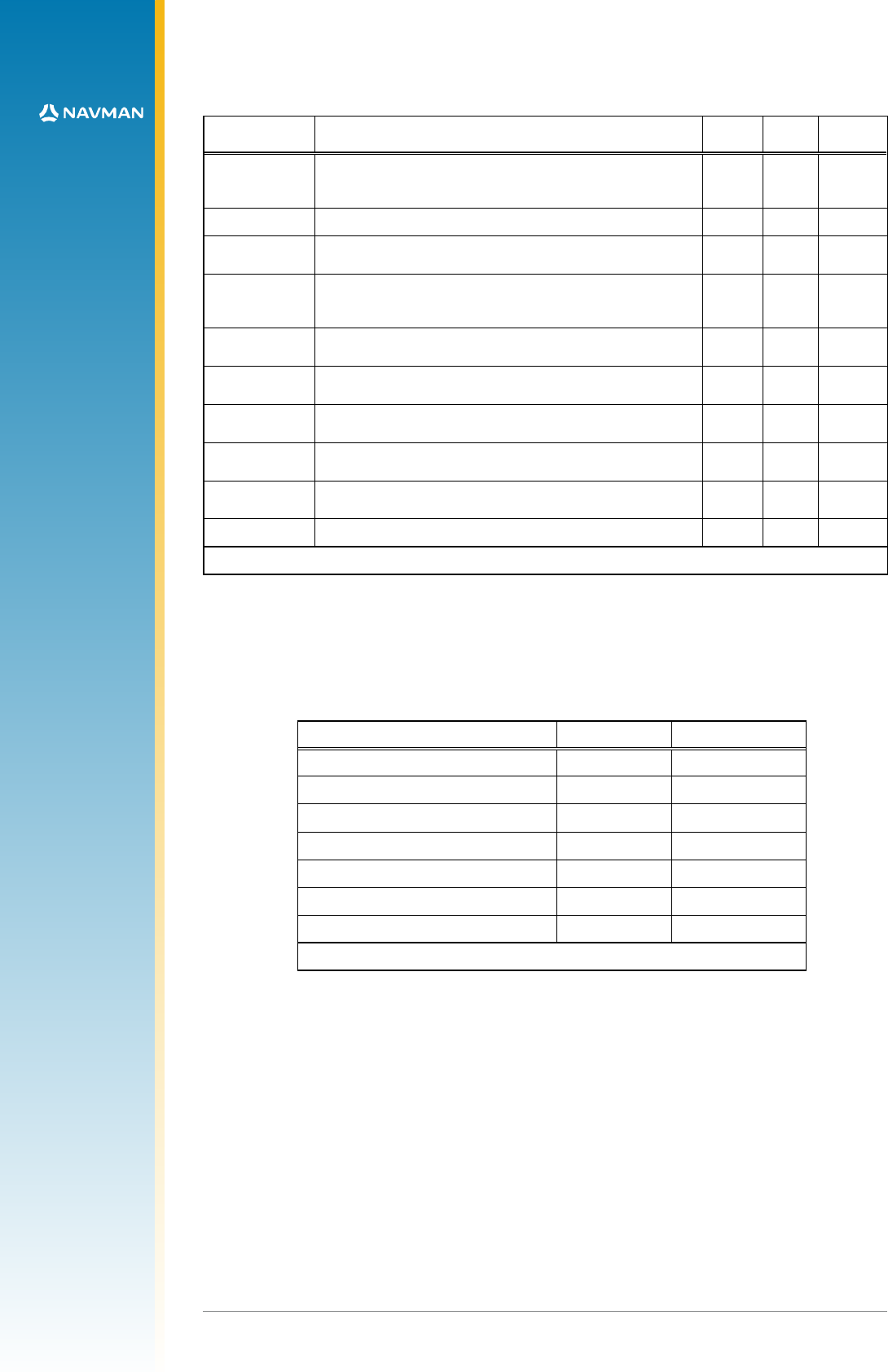
Table 5‑3 shows the software features available with the Jupiter 20 congurations.
Feature Description J20
GSW2.3
J20S
XTrac
J20D
SiRFDrive
SBAS capability
Improves position accuracy by using freely available
satellite‑based correction services called SBAS (Satellite
Based Augmentation System)
A A
DGPS ready Accepts DGPS corrections in the RTCM SC‑104 format
E E
TricklePower
Improves battery life using this enhanced power management
mode
A A
Adaptive
TricklePower
Intelligently switches between TricklePower and full power
depending on the current GPS signal level (when TricklePower
is enabled)
E
yes
Advanced power
management
Improves battery life using a software‑based power
management
A
Push‑to‑Fix Provides an on‑demand position x mode designed to further
improve battery life
A A
Almanac to
Flash
Improves cold start times by storing the most recent almanac to
ash memory
yes yes
Low signal
acquisition
Acquires satellites and continues tracking in extremely low
signal environments
yes
Low signal
navigation
Continues navigating in extremely low signal environments
yes
1 PPS A timing signal generated every second on the second
E E
yes=always enabled A = available E = enabled by default in production units
Table 5-3: Jupiter 20 software capability
6.0 Dead Reckoning input specications
6.1 Gyro input specication
The specications shown in Table 6‑1 apply to the Jupiter 20D only.
Characteristics Value Unit
input max voltage range max +5, min 0 VDC
input resistance nominal 18.2 kΩ
nominal bias at zero angular velocity 2.5 VDC
nominal scale factor 22.2 mV per degrees/s
linearity ± 0.5 max %
angular resolution 0.055 degrees/s
max gyro angular rate ± 80 degrees/s
Note that clockwise rotation should cause the input to rise
Table 6‑1: Gyro input specications
At the time of publication, recommended manufacturers of gyros are as follows:
Murata ENV series
Panasonic EWTS series
(Navman takes no responsibility for the use of these gyros in an application.)
6.2 Wheel tick rate
The wheel tick rate is 4 kHz maximum, 1 Hz minimum.
6.3 Fwd/Rev input sense
The fwd/rev input sense is: LOW=forward, HIGH=reverse. External pull down is required if this
input is not used.