



















13
LA000507G © 2006 Navman New Zealand. All rights reserved. Proprietary information and specications subject to change without notice.
5.0 Software interface
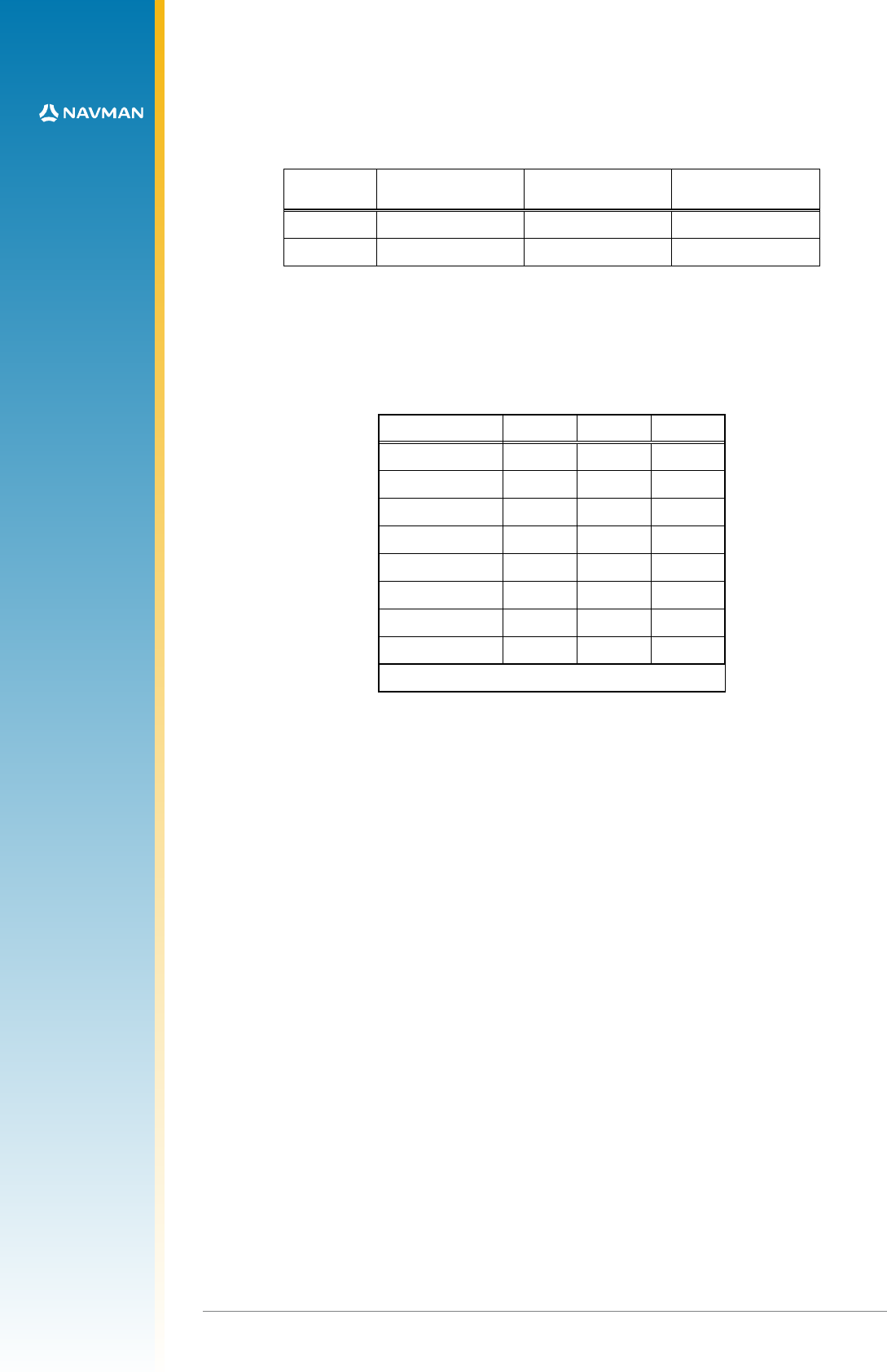
The host serial I/O port of the receiver’s serial data interface supports full duplex communication
between the receiver and the user. The default serial modes are shown in Table 5‑1.
Port
J20
(GSW2.3)
J20S
(XTrac)
J20D
(SiRFDRive 1.0)
Port A NMEA, 9600 NMEA, 9600 NMEA, 9600
Port B RTCM, 9600 SiRF binary, 38 400 RTCM, 9600
Table 5-1: Jupiter 20 default baud rates
5.1 NMEA output messages
The output NMEA (0183 v2.2) messages and intervals for the receiver are listed in Table 5‑2.
A complete description of each NMEA message is contained in the Navman NMEA reference
manual (MN000315).
NMEA message J20 J20S J20D
GGA 1 s 1 s 1 s
GSA 1 s 1 s 1 s
GSV 1 s 1 s 1 s
RMC 1 s 1 s 1 s
VTG 1 s 1 s 1 s
GLL 1 s 1 s 1 s
ZDA 1 s N/A N/A
PTTK, DR N/A N/A 1 s
N/A=not available
Table 5-2: Default NMEA messages
5.2 SiRF binary
A complete description of each binary message is contained in the SiRF Binary Protocol
reference manual.
5.3 Software functions and capabilities
The Jupiter 20 has additional capabilities to the standard SiRF GPS software:
• GPS x output – GPIO10 Low for 2D or 3D x
• GPIO command control via serial commands – for use by customer
• Gyro, wheel‑tick and forward reverse inputs (DR only)
• Antenna power monitor messages and power control O/P (non DR only)
• PTTK, DR – DR status messages in NMEA protocol format
Refer to the Jupiter 20 Integrator’s manual (LA000508) for further information.