



















1. OPERATION
7
6.0
nm
2.0
Target
VRM
VRM
range
Range, bearing
and time-to-go
to cursor
location
RNG 2.22nm
BRG 45.62°
TTG 02H21M
Cursor
EBL
- - -
.-
°
VRM
2.91
nm
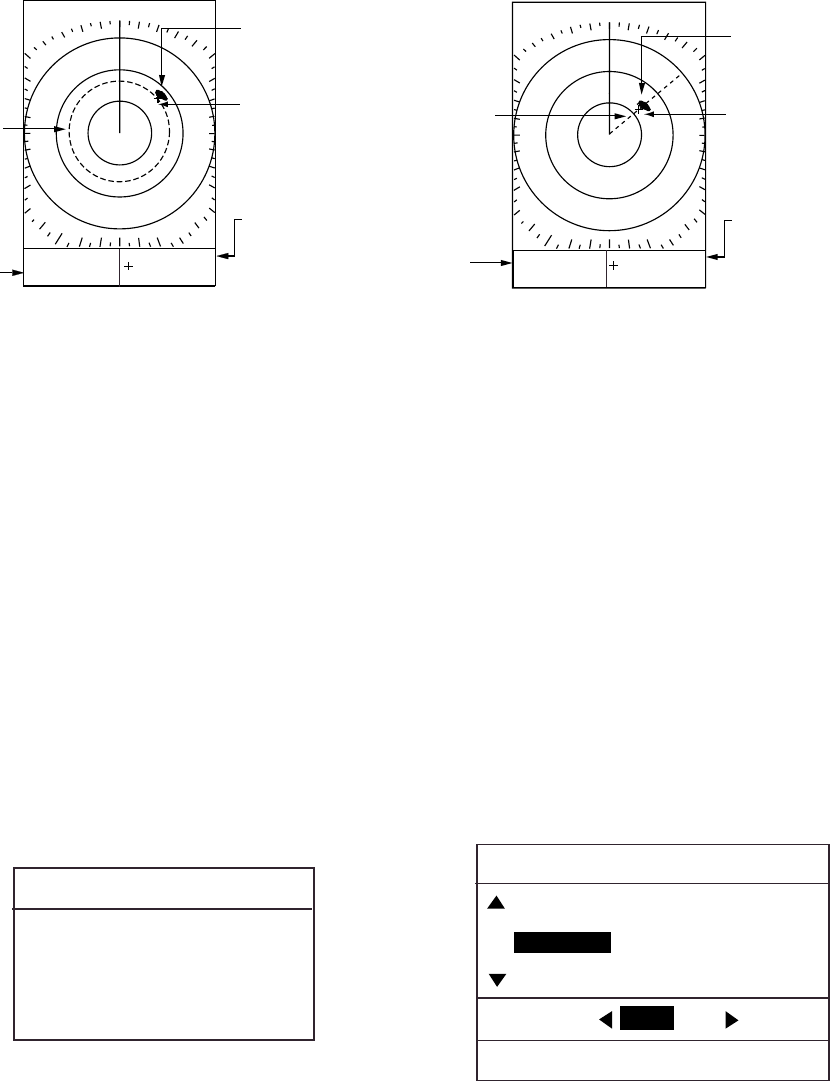
How to measure the range with the
VRM and cursor
1.11 Measuring the Bearing
The bearing to a target can be measured with
the cursor and the EBL (Electronic Bearing
Line).
Measuring bearing with the cursor
Operate the cursor pad to place the cursor on
the inside edge of the target. Read the
bearing to the target at the bottom right
corner.
Measuring bearing with the EBL
1. Press the [MARK] key to show the Mark
menu.
MARK MENU
[GAIN] : EBL
[ALARM] : VRM
[MARK] : TLL OUTPUT
Mark menu
2. Press the [GAIN] key to show the EBL,
which is a dashed line to distinguish it
from the heading line.
3. Operate the cursor pad to bisect the
target with the EBL.
4. Check the EBL readout at the bottom left
corner on the screen to find the bearing to
the target.
To anchor the EBL, press the [MENU/ESC]
key. To erase the EBL, press the [GAIN] key
twice with the MARK MENU displayed.
6.0
nm
2.0
EBL
bearing
RNG 2.22nm
BRG 45.62°
TTG 02H21M
Range, bearing
and time-to-go
to cursor
location
Target
EBL
Cursor
EBL 45.62
°
VRM
- - - -
nm
Measuring range by the EBL and cursor
1.12 Shifting the Display
Own ship position, or sweep origin, can be
displaced manually or automatically to
expand the view field without switching to a
longer range. The default shift method is
manual.
If shift is activated when nav data is displayed,
the nav data is automatically erased.
1. Use the cursor pad to place the cursor
where you want to shift own ship position.
2. Press the [MODE] key to show the
Display Mode menu.
DISPLAY MODE
[MENU/ESC] : Exit
SHIFT (MANUAL)*
NORMAL
ZOOM
NAV DISP OFF ON
Display mode menu
3. Press ▲ to choose SHIFT (MANUAL).
Note: If SHIFT (AUTO) is shown, open
the System menu and set SHIFT MODE
to MANUAL. For further details, see
SHIFT MODE on page 17.
4. Press the [MENU/ESC] key to close the
menu.