



















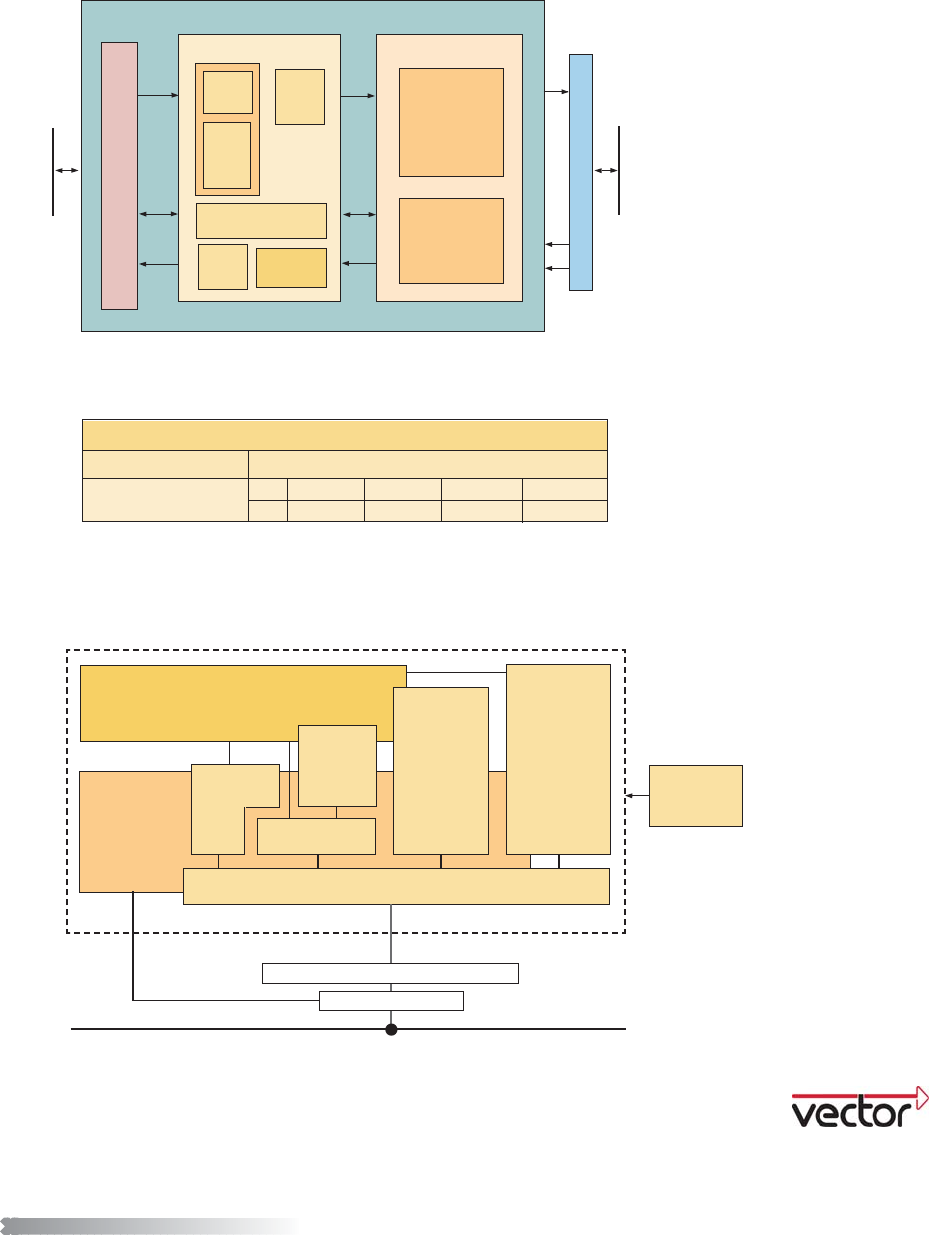
CAN IP
CAN PHY
TX
CLK
RX
CAN Bus
The LogiCORE IP for the Controller Area Network (CAN) is a
controller compliant to ISO 11898-1, CAN 2.0A and CAN 2.0B
standards. It provides characteristics such as:
• Validated at C&S group
• Supports bit rates of up to 1 Mbps
• Supports both standard (11-bit identifier) and extended
(29-bit identifier) frames
• Transmit and receive message FIFOs with user-configurable
depths of up to 64 messages
• Transmit prioritization through one High-Priority Transmit buffer
• Acceptance filtering (user-configurable number) of up to
4 acceptance filters
• Maskable Error and Status Interrupts
• Supported in CORE Generator software for stand alone applications
and in EDK for MicroBlaze-based ECU applications
Working closely with Vector, the availability of the CAN Driver for
the Xilinx MicroBlaze 32-bit processor, enables easy access to the
full suite of Vector’s CANbedded Software solution.
• The CAN Driver handles the hardware-specific characteristics
of the Xilinx FPGA and provides the initialization, wakeup
detection, transmission and reception of messages with
data—and functional interface data—and functional
notification including indication and confirmation as
well as overrun and error handling
• Provision of a standardized application
interface to the higher level software modules
as the interaction layer, transport protocol,
network management, universal measurement
and calibration protocol also available through Vector
• Several diagnostics layers available in accordance with
ISO14229 (UDS) and ISO14230 (Keyword Protocol 2000)
• Full integration into the Vector tools chain including flash
programming, operating system, database and debug tools
Automotive
CAN Solution Fle
32 bit
OPB or
PLBv46
Bus
Object Layer
Transmit
Buffer
Transmit
High
Priority
Buffer
TX
Priority
Logic
Configuration
Registers
Receive
FIFO
Acceptance
Filtering
Transfer Layer
Bit Stream
Processor
Bit Timing
Module
Application
Communication
Control
Layer
Diagnostics
Network
Management
Universal
Measurement
and Calibration
Protocol
Interaction
Layer
Transport Protocol
CAN Driver
Transceiver
CAN
Configuration
Tool
Courtesy of Vector Group
User Interface (UI)
Xilinx LogiCORE IP CAN Controller
CAN IP Specifics
Spartan-3, Spartan-3E,Spartan-3A, Spartan-3A DSP
Resources Used
I/O LUTs FFs BlockRAMs Slices*
3 868-1056 411-593 2 569-885
* Represent typical slice count for Spartan-3 generation devices.Results will vary on device utilization and ISE options
Supported XA Device Families
Auto.Brochure_Final.qxd 12/19/07 9:19 AM Page 12