



















RoyalTek RGM-3000/REB-3000
GPS Module Operational Manual)
20
but operates independently. The byte count
refers to the payload byte length. Likewise,
the check sum is a sum on the payload.
Message Length
The message length is transmitted high
order byte first followed by the low byte.
High Byte Low Byte
<0x7F> Any value
Even though the protocol has a maximum
length of (2
15
-1) bytes practical
considerations require the SiRF GPS
module implementation to limit this value to
a smaller number. Likewise, the SiRF
receiving programs (e.g., SiRF demo) may
limit the actual size to something less than
this maximum..
Payload Data
The payload data follows the message
length. It contains the number of bytes
specified by the message length. The
payload data may contain any 8-bit value.
Where multi-byte values are in the payload
data neither the alignment nor the byte order
are defined as part of the transport although
SiRF payloads will use the big-endian order.
Checksum
The check sum is transmitted high order
byte first followed byte the low byte. This is
the so-called big- endian order
High Byte Low Byte
<0x7F Any value
The check sum is 15-bit checksum of the
bytes in the payload data .The following
pseudo code defines the algorithm used. Let
message to be the array of bytes to be sent
by the transport. Let msgLen be the number
of bytes in the message array to be
transmitted .
Index = first
checkSum = 0
while index < msgLen
checkSum = checkSum +message[index]
checkSum = checkSum AND(2
15
-1)
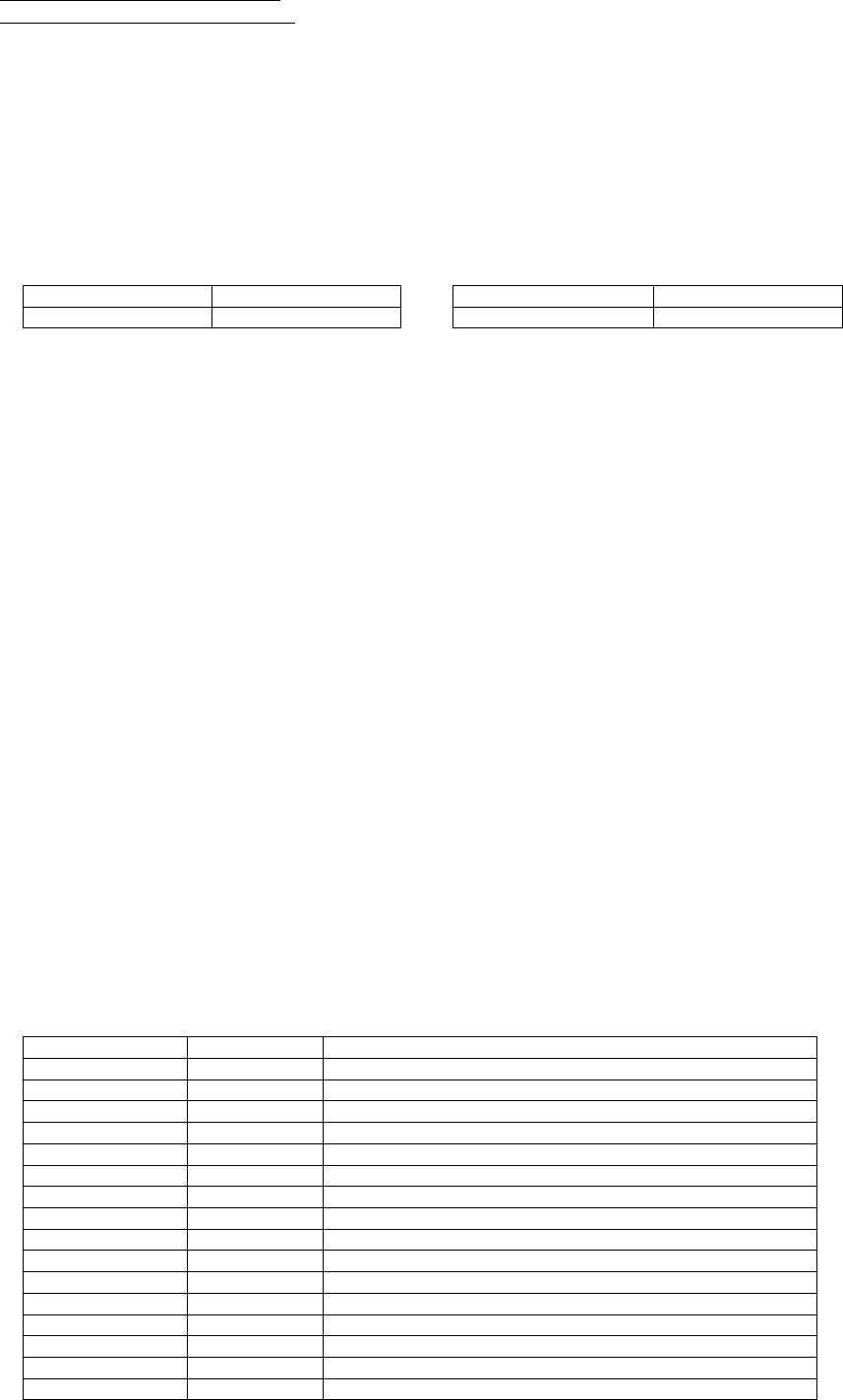
Input Messages for SiRF Binary Protocol
Note – All input messages are sent in BINARY
format
Table 19 SiRF Messages – Input Message List
Hex ASCII Name
0 x 80 128 Initialize Data Source
0 x 81 129 Switch to NMEA Protocol
0 x 82 130 Set Almanac
0 x 84 132 Software Version
0x 85 133 DGPS Source Control
0x 86 134 Set Main Serial Port
0 x 88 136 Mode Control
0 x 89 137 DOP Mask Control
0 x 8A 138 DGPS Mode
0 x 8B 139 Elevation Mask
0 x 8C 140 Power Mask
0 x 8D 141 Editing Residual
0 x 8E 142 Steady-State Detection
0 x 8F 143 Static Navigation
0 x 90 144 Clock Status
0 x 91 145 Set DGPS Serial Port