



















7
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
Please refer to the Cycloid-M2 Board manual for more details.
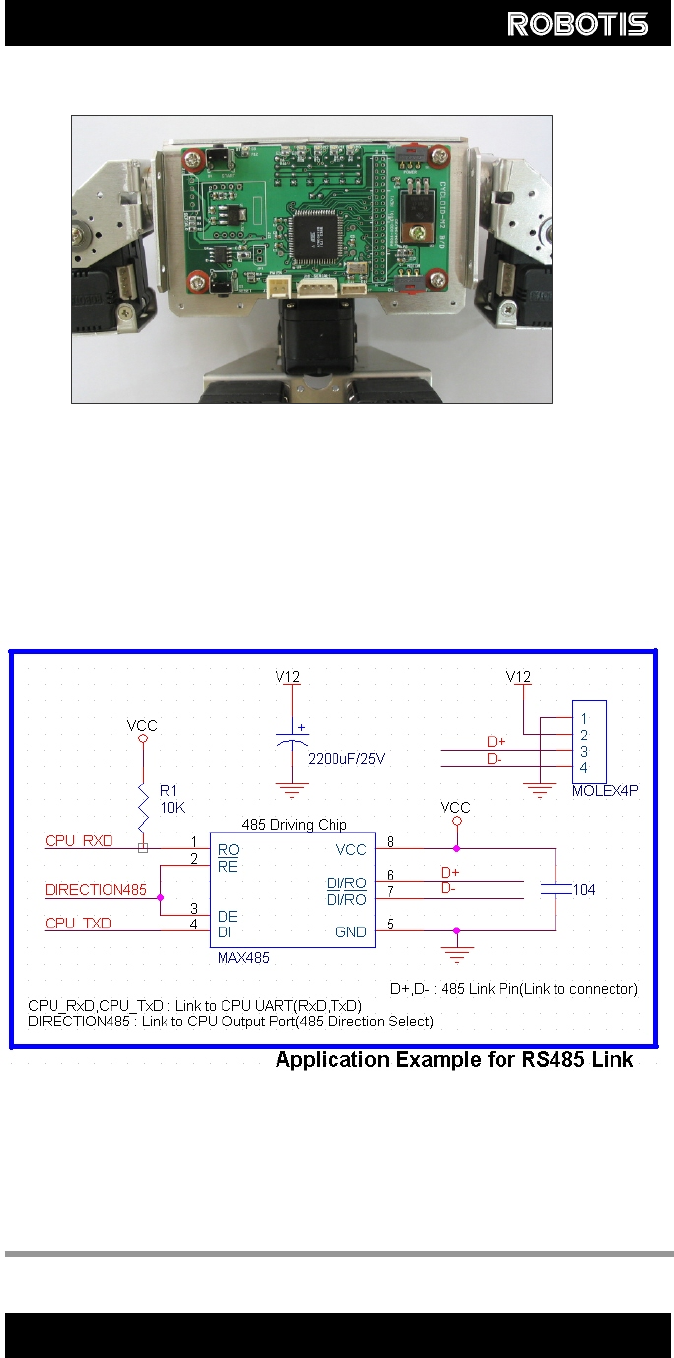
Connection to UART To control the Dynamixel, the main Controller needs to convert the signals to
RS485. The recommended schematic configuration is as follows:-
전원은 Main Controller의 Molex4P Connector의 Pin1,Pin2를 통하여 Dynamixel로
공급되어진다.
Signal DIRECTION485 determines the data direction as follows:-
If DIRECTION485 is High: the signal TxD is output as D+,D-
If DIRECTION485 is Low: signal D+,D- is input as RxD
Cycloid-M2 Board on Robot