



















16
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
From Address 0x18 in the RAM area.
Address 0x18 Torque Enable
. When power is first applied the Dynamixel enters the Torque
Free Run condition. To allow torque to be applied Address 0x18 must be set to 1.
(Torque Enabled Condition)
Address 0x19 LED is on when set to 1 and LED is off if set to 0.
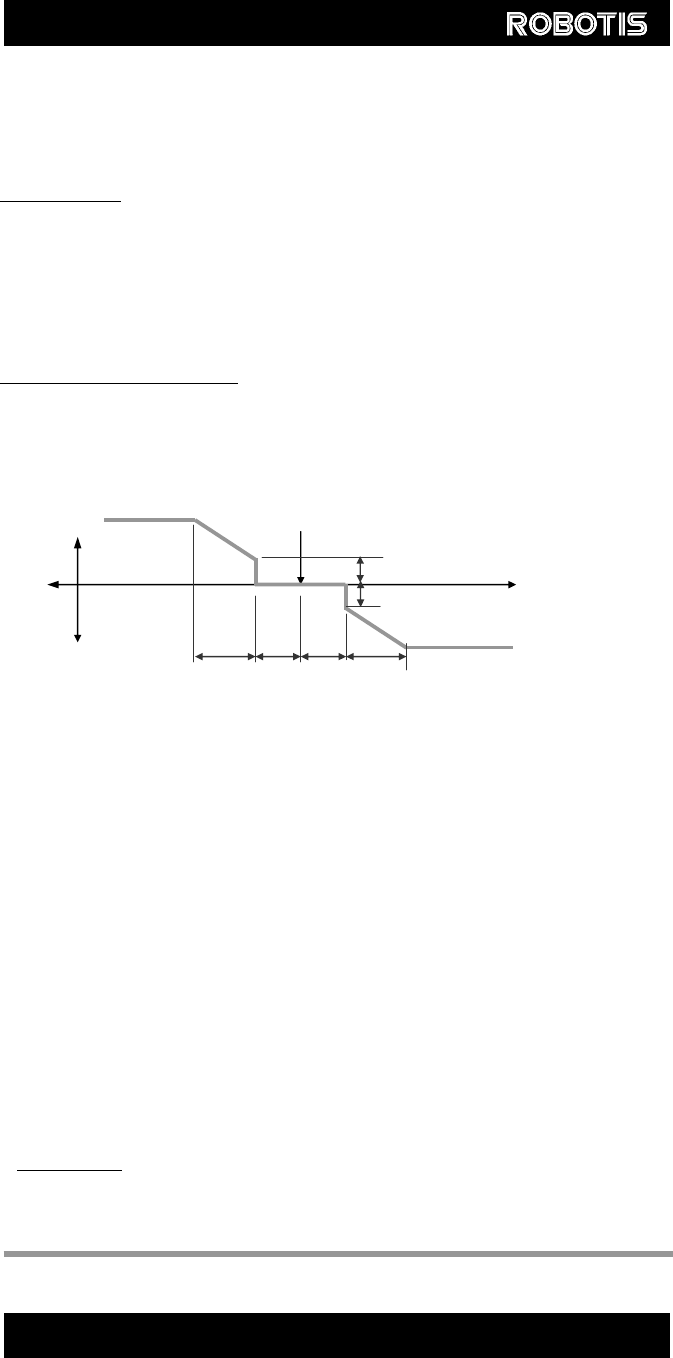
Address 0x1A~0x1D Compliance Margin and Slope
. The Dynamixel controls Compliance by setting the
Margin and Slope. If used well Compliance will absorb the shocks. The following
graph demonstrates the use of Compliance values (length of A,B,C & D) relative
to Position Error and applied torque.
Address 0X1E,0x1F Goal Position
. Requested Angular Position for the Dynamixel to move to. If this
is set to 0x3ff, then the goal position will be 300
°.
Goal Position
CW
CCW
CW
CCW
B
A
C D
X axis:Position Error
Y axis:Output Torque
E
A : CCW Compliance Slope(Address0x1D)
B : CCW Compliance Margin(Address0x1B)
C : CW Compliance Margin(Address0x1A)
D : CW Compliance Slope (Address0x1C)
E : Punch(Address0x30)
E