



















10-1
10. VIDEO SOUNDER OPERATION
This chapter covers video sounder operation. The procedures in this chapter
assume that a full screen video sounder display is selected.
Principle of Operation
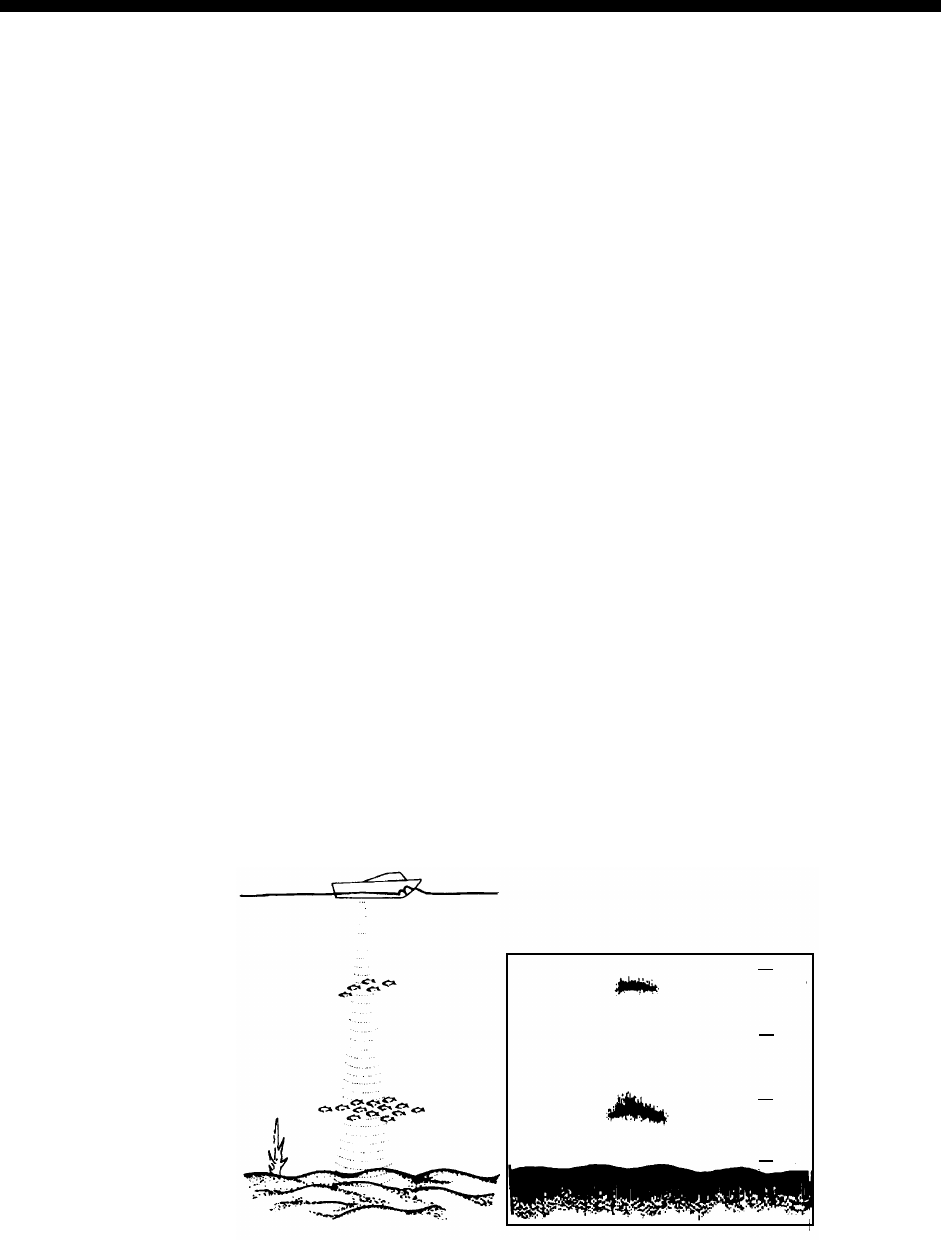
The video sounder determines the distance between its transducer and
underwater objects such as fish, lake bottom or seabed and displays the results
on screen. It does this by utilizing the fact that an ultrasonic wave transmitted
through water travels at a nearly constant speed of 4900 feet (1500 meters) per
second. When a sound wave is reflected back toward the source (transducer).
Thus by calculating the time difference between the transmission of a sound
wave and the reception of the reflected sound wave, the depth to the object can
be determined.
The entire process begins in the sounder. Transmitter power is sent to the
transducer as a short pulse of electrical energy. The electrical signal produced
by the transmitter is converted into an ultrasonic signal by the transducer and
transmitted into the water. Any returning signals from intervening objects (such
as a fish school) are received by the transducer and converted into an electrical
signal. The signals are then amplified in the amplifier section, and finally,
displayed on screen.
The picture displayed is made up of a series of vertical scan lines, one for each
transmission. Each line represents a snapshot of what has occurred beneath the
boat. A series of snapshots are accumulated side by side across the screen, and
the resulting contours of the bottom and fish between the bottom and surface
are displayed.
-
-
-
-
-
-
-
-
-
-
-
-
0
50
150
100
Underwater conditions and video sounder display