















Adjusting the fork and shock absorber
There are a number of ways to adjust the fork and shock absorber to match the chassis to
your driving style and the payload.
We have provided a table with pragmatical values to help you tune up your motorcycle. These
tune-up specifications are reference values only and should serve as a basis for your per-
sonal chassis and suspension tuning. Do not make arbitrary changes to the settings (maxi-
mum ±40%) since this may impair the handling characteristics (particularly in the high-
speed range).
Make sure both fork legs are equally adjusted.
A sticker with the basic settings is located under the seat.
Adjusting rebound damping of fork
Hydraulic rebound damping determines the reaction when the fork is rebound. By turning
the adjusting screw [2] (REB), the degree of damping of the rebound can be adjusted. Turn
the knob clockwise to increase damping, turn it counterclockwise to reduce damping dur-
ing rebounding. Make the same damping rate adjustment to both fork legs.
STANDARD ADJUSTMENT
– Turn adjusting screw clockwise as far as it will go.
– Super Duke: Turn 15 clicks in a counterclockwise direction.
– Super Duke R: Turn 16 clicks in a counterclockwise direction.
MAINTENANCE WORK ON CHASSIS AND ENGINE »
37
Adjusting compression damping of fork
Hydraulic compression damping determines the reaction when the fork is compressed.
Turn the adjusting screws [1] clockwise to increase damping, turn it counterclockwise to
reduce damping during compression. Make the same damping rate adjustment to both fork
legs.
STANDARD ADJUSTMENT
– Turn adjusting screw clockwise as far as it will go.
– Super Duke: Turn 15 clicks in a counterclockwise direction.
– Super Duke R: Turn 18 clicks in a counterclockwise direction.
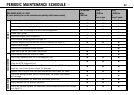
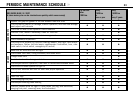
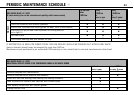
BASIC SETTING
FORK WP 4860 ROMA
Super Duke Super Duke R
Driving Comfort
Basic Setting
Driving Sport
Maximum Payload
Basic Setting
Driving Sport
Race course
Maximum Payload
Compression adjuster (clicks)
20
15
10 10
18
18 14 18
Rebound adjuster (clicks)
20
15
10 10
16
16 12 16
Spring preload (turns)
5
5
5 5
5
5 5 5
1
2
2