







ENTERING COMMANDS
The SMART-AG uses a comprehensive command interface.
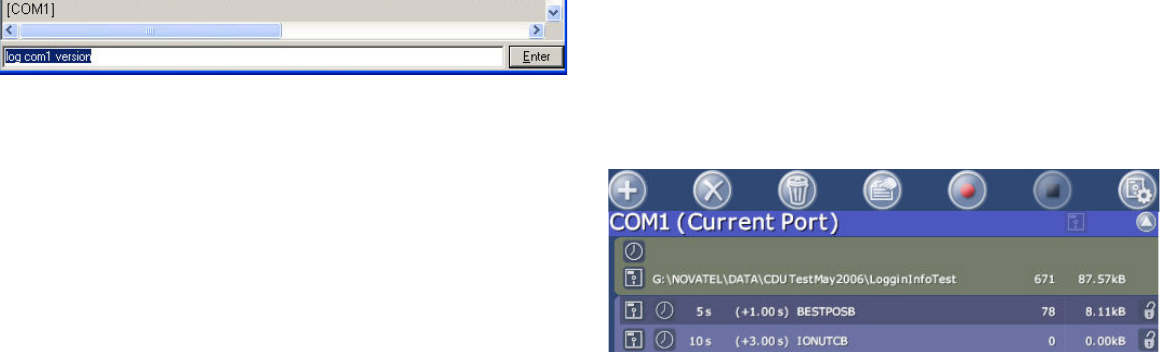
Commands can be sent to the receiver using the Console
window in CDU, which is opened from the View menu. Enter
commands in the text box at the bottom of the Console window.
The following information is important when entering commands:
• Commands can be entered in three formats:
• ASCII (log bestposa)
• Abbreviated ASCII (log bestpos)
• Binary (log bestposb).
Abbreviated ASCII is the best format to use when you
wish to work with the receiver directly. For data
collection, use ASCII or Binary.
• Press Enter to send the command string to the receiver.
• The commands are not case sensitive.
The OEMV Family Quick Reference Guide provided with the
receiver lists the available commands and the parameters they
use for the Abbreviated ASCII format.
LOGGING DATA
An extensive collection of logs has been created to capture the
data your SMART-AG receives and processes. These logs can
be directed to a SMART-AG port (COM1, COM2 or USB) and
can be automatically generated when new or changed data
becomes available or at regular intervals. The available logs are
listed in the OEMV Family Quick Reference Guide.
To log data, use the LOG command. For example, to log the
pseudorange position to COM 2 every 30 seconds, enter the
following:
LOG COM2 PSRPOS ONTIME 30
Logs can be generated in one of three formats: ASCII,
Abbreviated ASCII, or Binary. Refer to the OEMV Family
Firmware Reference Manual (OM-20000094) for information on
the LOG command, specifying the output format, and the
detailed contents of each log.
If you prefer, CDU provides a graphical interface for configuring
data logging. Select Logging Control Window from the Tools
menu. In the Logging Control window, you can select which logs
to capture and choose to which ports to send the data. In
addition, you can specify a file in which to save the data.
When logging data through CDU, close all unused graphical
windows to save COM port throughput and receiver CPU usage.
NMEA LOGS
To configure the receiver output through the command line:
1. Configure the communication port using the COM
command. For example, to set COM port 2 to 9600 bps, no
parity, 8 data bits, 1 stop bit, no handshaking, echo off, and
break on, enter the following:
com com2 9600 n 8 1 n off on
2. Select and configure the NMEA string that you want to
output. For example, to log gpgga (position system fix data
and undulation) at 2 Hz, enter the following:
log gpgga ontime 0.5
ENABLING SBAS POSITIONING
To enable SBAS positioning, enter the following command:
sbascontrol enable
To enable GL1DE, enter the following commands:
pdpfilter enable
pdpmode relative auto
USING THE CAN BUS
A CAN Bus is a serial bus that provides services for processes,
data and network management. There is CAN Bus capability
through the SMART-AG cable, see Table 1 on Page 1. CAN Bus
functionality is controlled through NovAtel’s optional API
software available through Customer Service. The API header
file (*.h), in the API folder after installation, includes
documentation on using the CAN Bus.
NMEA 2000 is a CAN standard created by the National Marine
Electronics Association and designed to support networking in
marine applications. It functions over a longer physical distance,
and supports more physical nodes than ISO 11783. The
relationship between NMEA2000 and SAE J1939 is that J1939
is the standard,while the NMEA 2000 group has added some
new messages (called PGNs or Parameter Group Numbers)
and added a new, additional transport protocol called
FastPacket. NMEA2000 compliant, for all intents and purposes,
means J1939 compliant plus support for new NMEA2000
messages. In other word, one cannot have NMEA2000 without
J1939 support as well. J1939 is additionally “harmonized” with
ISO 11783, a standard for the agriculture industry.
The CAN module is generally not user-interactive. It is activated
when a SETCANNAME command is entered, and after a
SAVECONFIG, the CAN module is activated immediately on all
subsequent start-ups. The module supports NMEA2000
Parameter Group Message (PGN): PGN 129029
GNSSPositionData, PGN 129025 GNSSPositionRapidUpdate,
and PGN 129026 COGandSOGRapidUpdate.
EMULATED RADAR (ER)
The SMART-AG outputs an emulated RADAR signal. The
enclosure outputs ER via the bare wires labeled ER GND and
ER_OUT on the SMART-AG cable. See Table 1 on Page 1 for
the pin-out details of this cable. Also see Appendix B.5
RADARCFG of the SMART-AG User Manual.
The ER outputs a logic high of 6.3 V minimum and logic low of
1.5 V maximum with a rise and fall time of less than 1 ms. Its
output references battery GND when output is logic low and
provides logic low output until its speed is greater than 1 km/Hr.
It provides an output frequency that represents 26.11 Hz/km/Hr
with an effective range from 1 km/Hr to 55 km/Hr and uses 2D
velocity for near-horizontal applications.
TERRAIN COMPENSATION
The SMART-AG Terrain Compensation feature corrects for
errors in position caused by rolling of the vehicle. The SMART-
AG senses the vehicle’s roll angle and, with the user-entered
“height above ground”, compensates the position output to give
the position under the vehicle rather than at the antenna. Once
configured, corrected positions are sent to host equipment. See
the Appendix B.4 $PMDT of the SMART-AG User Manual.
For proper operation, SMART-AG requires proper installation,
accurate height setting and levelling of the tilt sensor.